RPM (otáčky za minutu) a úhlový senzor je zařízení používané k měření pohybu, rychlosti nebo úhlové polohy rotujícího objektu – obvykle hřídele, osy nebo disku. Takové senzory jsou široce používány, od malých tiskáren až po velké výrobní stroje, automobily, letadla a mnoho dalších. Ale jak přesně fungují?
Abychom na tuto otázku odpověděli, musíme nejprve rozlišit různé typy senzorů. Existuje několik druhů založených na různých provozních principech a fyzikálních efektech. Dva nejběžnější jsou optické senzory a magnetické senzory.
Co jsou magnetické senzory?
Samotné magnetické senzory lze dále rozdělit do několika různých skupin klasifikovaných podle jejich specifického principu činnosti. Běžně se používají mimo jiné indukční snímače a snímače TMR (tunel magnetoresistance).
Co jsou indukční senzory?
Indukční senzor je jednoduchý magnetický senzor založený na základech elektrodynamiky – indukci proudu v důsledku změn magnetického pole. Obecně se indukční snímač skládá z cívky jádra připojené k permanentnímu magnetu na jednom konci cívky. Pokud se pak feromagnetický kus pohybuje kolem senzoru dostatečně blízko, magnetické pole v cívce se změní a vyvolá tok proudu ve vinutí cívky. Tento proud nebo odpovídající napětí pak lze měřit.
Obrázek 1 ukazuje zjednodušené schéma tohoto procesu s použitím feromagnetického ozubeného kola. Pokaždé, když zub ozubeného kola obejde senzor, indukuje se proud a naše měření vrcholí. Ze stejného důvodu je měření nejnižší, když mezera prochází. Získáme tedy oscilační signál, kde jediný kmit představuje jeden zub a průchod mezerou. Při znalosti celkového počtu zubů je pak možné vypočítat čas na otáčku a tedy i otáčky za minutu (RPM), frekvenci a úhlovou polohu.
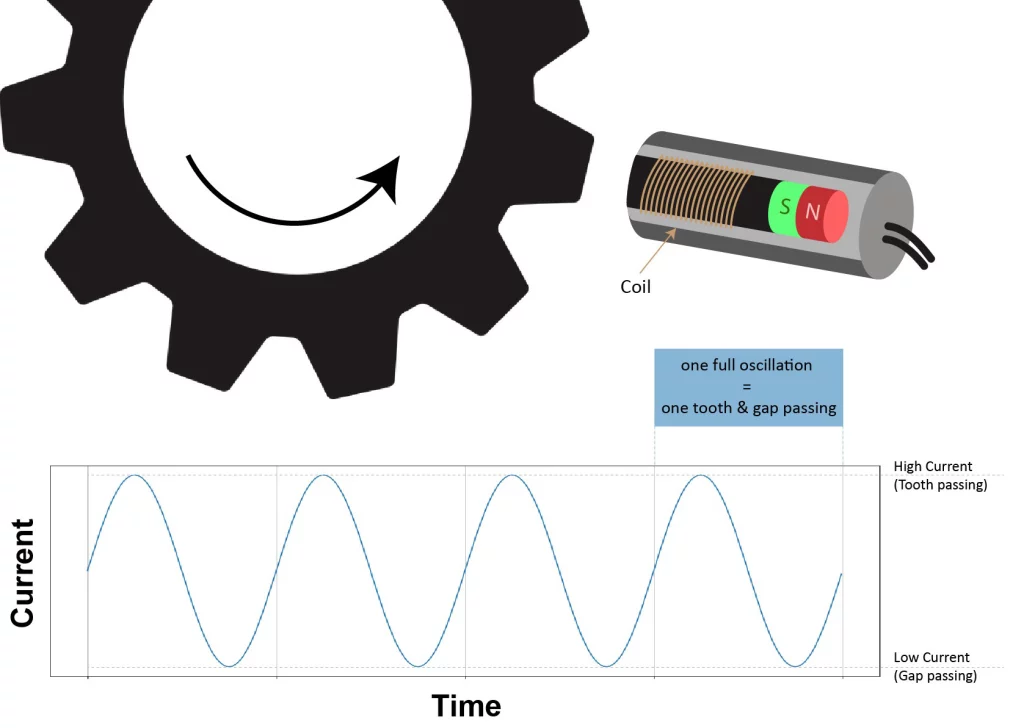
Obrázek 1: Zjednodušené znázornění principů činnosti magnetického senzoru. Otáčením feromagnetického ozubeného kola se mění magnetické pole v cívce a indukuje se měřitelný proud.
Co jsou senzory TMR?
Senzory TMR se skládají ze dvou součástí: magnetu připevněného k rotujícímu předmětu a senzoru magnetorezistence (MR). Samotný MR senzor je vyroben ze dvou feromagnetických vrstev – kolíkové vrstvy a volné vrstvy – oddělených izolátorem. I když je magnetické pole kolíkové vrstvy pevné, magnetické pole volné vrstvy se může otáčet, a proto se mění podle magnetického pole vnějšího magnetu.
Snímač musí být umístěn v určité vzdálenosti od magnetu, aby byla umožněna interakce mezi dvěma magnetickými poli. Senzor pak měří změnu odporu aplikovaného magnetického pole vlivem vnějšího rotujícího magnetického pole vytvářeného rotujícím magnetem. Pokud jsou obě magnetická pole zarovnaná, a proto směřují stejným směrem, je odpor nízký. Pokud však vnější pole ukazuje opačným směrem než pole působící, naměříme vysoký odpor. Proto je možné získat periodu a úhlovou polohu kdykoli.
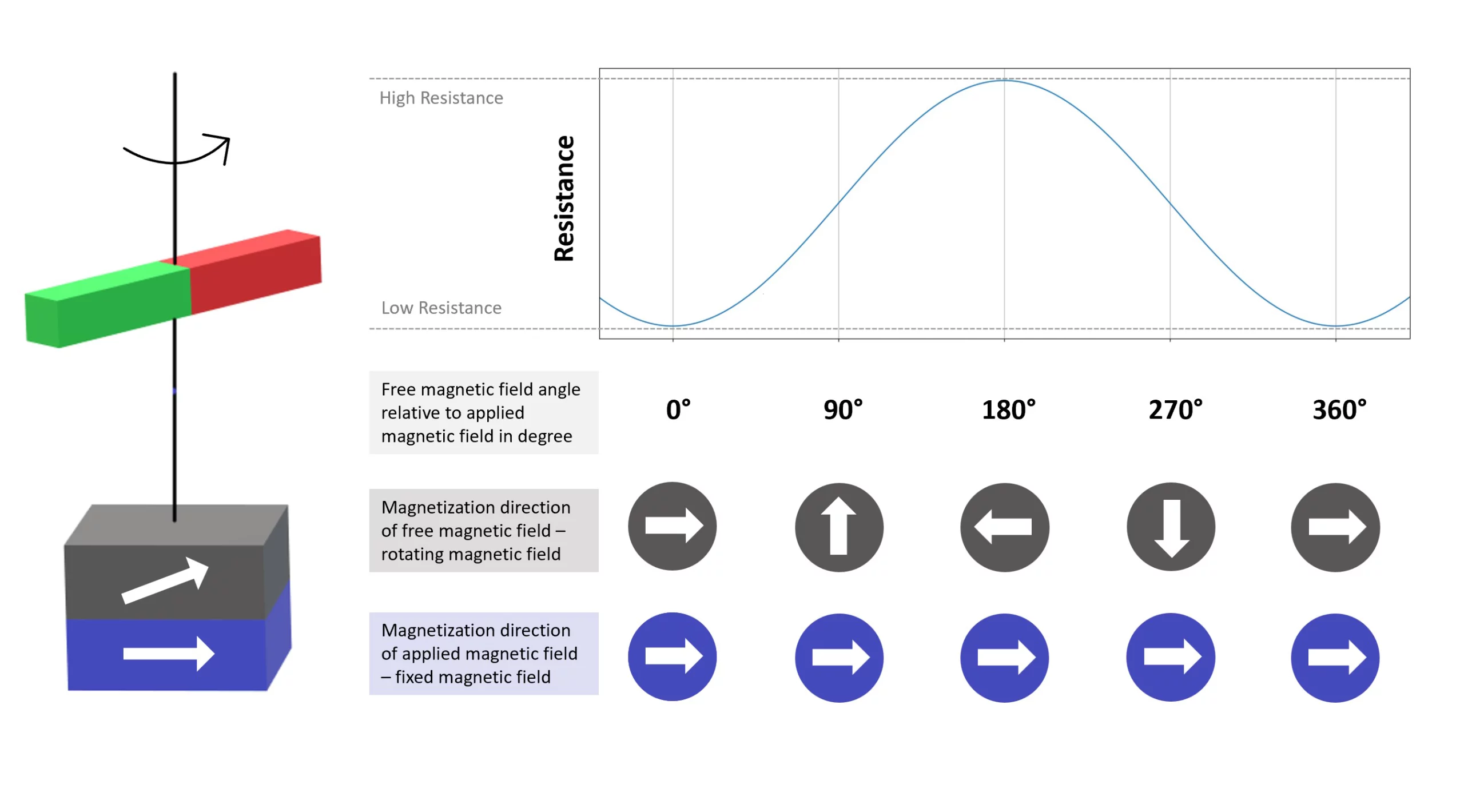
Obrázek 2: Zjednodušené znázornění principů činnosti senzoru TMR. Vlivem otáčení magnetu se odpor snímacího prvku mění s úhlem natočení.
Co jsou to optické senzory?
Optické senzory měří rotaci objektu měřením světla, které se periodicky odráží od samotného objektu. Za tímto účelem infračervený (IR) laser obvykle vysílá světlo na rotující předmět. Samotný předmět je označen lepicí páskou nebo jiným podobným reflexním materiálem, který odráží dopadající paprsek zpět na snímač. K měření odraženého světla se obvykle používá fotodioda, která převádí absorbované světlo na měřitelný proud. Každý vrchol intenzity světla v důsledku odrazu je paralelní s vrcholem elektrického signálu a umožňuje tak určit frekvenci, periodu, rychlost otáčení a úhlovou polohu.
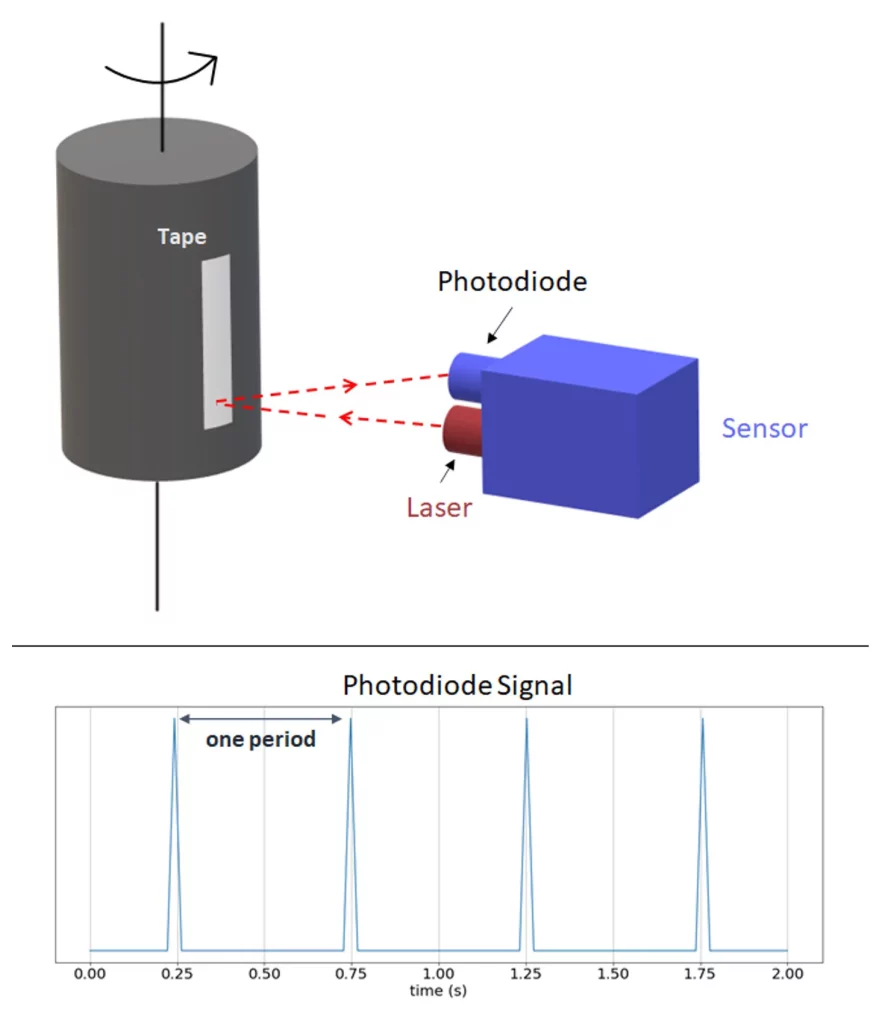
Obrázek 3: Schematické znázornění principů činnosti optického snímače otáček. Ilustrace detekce zvýšeného signálu v důsledku silnějšího odrazu na jediném proužku pásky.
Co je zpracování signálu a úhlové polohování?
Výše popsané optické a indukční snímače lze shrnout jako inkrementální kodéry. Signály poskytované těmito senzorovými prvky (optické nebo magnetické) jsou typicky převáděny na obdélníkové signály prahovými spínači. Výstupní impulsy jsou přenášeny do vyhodnocovací elektroniky a počítány. Výsledný počet pulzů napočítaných za časový interval představuje míru změny polohy.
Pro získání informace o směru pohybu se používají dva mírně posunuté snímače, což má za následek dva asynchronní signály. Z posloupnosti náběžné a odtokové hrany obou signálů je možné určit směr pohybu. Nakonec, pro absolutní určení polohy, je jednou za otáčku implementován nulový impuls, který označuje začátek/konec otáčky.
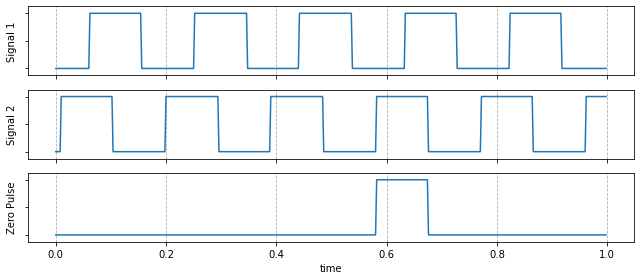
Obrázek 4: Konvertované obdélníkové signály získané ze dvou mírně posunutých snímačů plus nulový impuls. Tato měření zahrnují vše potřebné pro absolutní určení polohy.
Optické senzory u DEWETRONU
Jak již bylo uvedeno, snímače otáček se používají v široké řadě strojů. Zamýšlený účel se však vždy liší – někdy je potřeba pouze jako doplňková informace k jiným měřicím kanálům a jindy může být zapotřebí pro specifické analýzy. V závislosti na použití senzoru je montáž a instalace někdy jednoduchá a někdy ne.
S našimi produkty – TACHO PROBE a TAPE SENSOR – nabízíme dva snadno použitelné a snadno instalovatelné optické senzory pro sledování zakázek, vyvažování pole, obecná měření otáček a také analýzu rotačních a torzních vibrací. Oba snímače jsou vybaveny konektorem LEMO a lze je přímo propojit se vstupem čítače LEMO měřicího systému DEWETRON. Vstup čítače LEMO zajišťuje kromě přenosu signálu také napájecí napětí – není tedy potřeba další napájení.
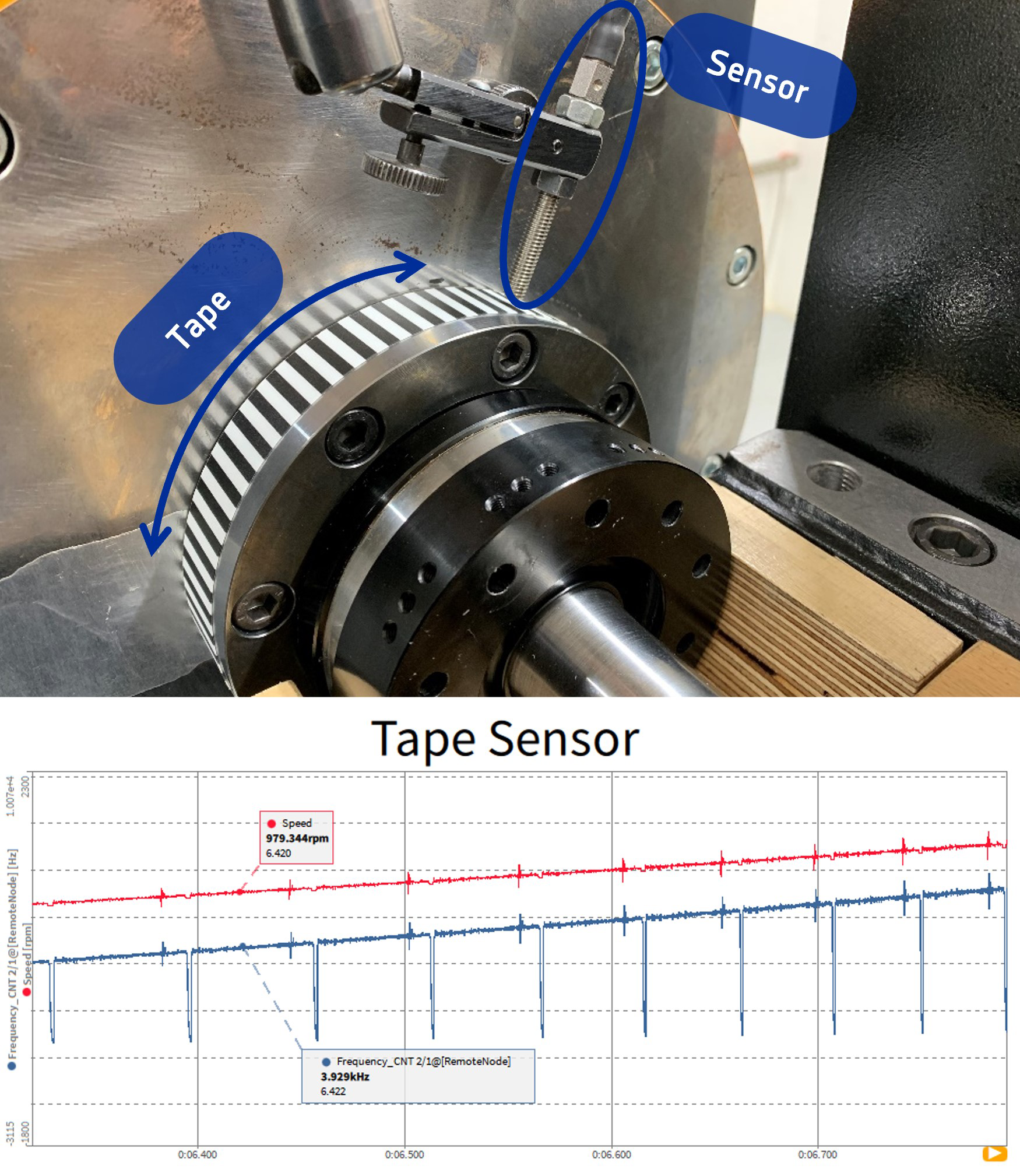
Obrázek 5: Praktické provedení páskového senzoru DEWETRON. Horní obrázek ukazuje namontovaný senzor plus reflexní černobílou pásku připevněnou k rotujícímu kolu. Spodní obrázek zobrazuje naměřená a zpracovaná data přes OXYGEN – intuitivní měřicí software DEWETRON.
Stručně řečeno, existuje spousta různých snímačů otáček a úhlu. Obvykle jsou založeny buď na optických nebo elektromagnetických efektech. Některé z nich mají složitější princip fungování a implementaci než jiné. My ve společnosti DEWETRON vám poskytujeme dva jednoduché, ale účinné optické senzory kombinované s vysoce detailním systémem měření pro různé praktické aplikace.
Poslední příspěvky
- Aplikační poznámka: Použití DEWE3-A4 v TU Graz Racing
- Co je WLTP? – Celosvětový harmonizovaný zkušební postup pro lehká užitková vozidla
- Řádová analýza
- OXYGEN 6.7 – Co je nového?
- Co je XCP?

Chladicí kapalina je zodpovědná za udržení chladného motoru vašeho vozidla. Bez něj. by teplota mohla být příliš vysoká! Zabraňte jakémukoli poškození motoru nebo neočekávané události s našimi snímači hladiny chladicí kapaliny.
Spínače na sloupku řízení jsou základním prvkem ve vašem vozidle. Jsou strategicky umístěny za volantem a umožňují úplnou kontrolu, aniž byste museli sundat ruce z volantu nebo odvrátit pohled od vozovky.
Originální čísla dílů se používají k identifikaci produktů, které prodáváme, pouze za účelem rozpoznání prodávaných položek zákazníky.
Tato stránka používá naše vlastní soubory cookie a soubory cookie třetích stran ke zlepšení navigace a přístupnosti našich webových stránek a k optimalizaci uživatelské zkušenosti. Kliknutím na «Nastavení» o nich získáte více informací a nastavíte nebo odmítnete jejich používání.
Copyright © 2024 Cojali S.L. Všechna práva vyhrazena
- Domů
- | Podmínky prodeje
- | Zásady ochrany osobních údajů
- | Kodex chování
- | Všeobecné podmínky použití
Tato stránka používá naše vlastní soubory cookie a soubory cookie třetích stran ke zlepšení navigace a přístupnosti našich webových stránek a k optimalizaci uživatelské zkušenosti. Všechny cookies můžete přijmout kliknutím na tlačítko „Přijmout“ nebo kliknutím na „Nastavení“, abyste o nich získali více informací a mohli nastavit nebo odmítnout jejich používání.
Vyberte svou zemi: ×
- Afghánistán
- Alandy
- Albánie
- Alžírsko
- Americká Samoa
- Andorra
- Angola
- Anguilla
- Antarktida
- Antigua a Barbuda
- Argentina
- Arménie
- Aruba
- Austrálie
- Rakousko
- Ázerbajdžán
- Bahamské ostrovy
- Bahrajn
- Bangladéš
- Barbados
- Bělorusko
- Belgie
- Belize
- Benin
- Bermudy
- bhůtán
- Bolívie
- Bosna a Hercegovina
- Botswana
- Bouvetův ostrov
- Brazílie
- Britské indickooceánské území
- Britské Panenské ostrovy
- Brunej
- Bulharsko
- Burkina Faso
- Burundi
- Kambodža
- Kamerun
- Kanada
- Kapverdy
- Caribbean Nizozemsko
- Kajmanské ostrovy
- Středoafrická republika
- Chad
- Chile
- Čína
- Vánoční ostrov
- Kokosové ostrovy (Keeling)
- Kolumbie
- Komory
- Kongo – Brazzaville
- Kongo – Kinshasa
- Cookovy ostrovy
- Kostarika
- Pobřeží slonoviny
- Chorvatsko
- Kuba
- Curaçao
- Kypr
- Česko
- Dánsko
- Džibutsko
- Dominika
- Dominikánská republika
- Ekvádor
- Egypt
- Salvador
- Rovníková Guinea
- Eritrea
- Estonsko
- Eswatini
- Etiopie
- Falklandy
- Faerské ostrovy
- Fidži
- Finsko
- Francie
- francouzsky Guyana
- Francouzská Polynésie
- Francouzská jižní teritoria
- Gabon
- Gambie
- Georgia
- Německo
- Ghana
- Gibraltar
- Řecko
- Grónsko
- Grenada
- Guadeloupe
- Guam
- Guatemala
- Guernsey
- Guinea
- Guinea-Bissau
- Guyana
- Haiti
- Heard a McDonaldovy ostrovy
- Honduras
- Hong Kong SAR Čína
- Maďarsko
- Island
- Indie
- Indonésie
- Írán
- Irák
- Irsko
- Isle of Man
- Izrael
- Itálie
- Jamaica
- Japonsko
- Trikot
- Jordán
- Kazachstán
- Keňa
- Kiribati
- Kuvajt
- Kyrgyzstán
- Laos
- Lotyšsko
- Libanon
- Lesotho
- Libérie
- Libye
- Lichtenštejnsko
- Litva
- Lucembursko
- ZAO Macao Čína
- Madagaskar
- Malawi
- Malajsie
- Maledivy
- Mali
- Malta
- Marshallovy ostrovy
- Martinik
- Mauritánie
- Mauricius
- Mayotte
- Mexiko
- Mikronésie
- Moldavsko
- Monako
- Mongolsko
- Černá Hora
- Montserrat
- Maroko
- Mosambik
- Myanmar (Barma)
- Namibie
- Nauru
- Nepál
- Nizozemí
- Nová Kaledonie
- Nový Zéland
- Nikaragua
- Niger
- Nigérie
- Niue
- Norfolk Island
- Severní Korea
- Severní Makedonie
- Severní Mariany
- Norsko
- Omán
- Pákistán
- Palau
- palestinská území
- Panama
- Papua-Nová Guinea
- Paraguay
- Peru
- Filipíny
- Pitcairn
- Polsko
- Portugalsko
- Portoriko
- Katar
- Shledání
- Rumunsko
- Rusko
- Rwanda
- Samoa
- San Marino
- Svatý Tomáš a Princův ostrov
- Saudská arábie
- Senegal
- Srbsko
- Seychely
- Sierra Leone
- Singapore
- Sint Maarten
- Slovensko
- Slovinsko
- Šalamounovy ostrovy
- Somálsko
- Jižní Afrika
- Jižní Georgie a Jižní Sandwichovy ostrovy
- Jižní Korea
- Jižní Súdán
- Španělsko
- Srí Lanka
- St. Barthélemy
- St. Helena
- Svatý Kryštof a Nevis
- St. Lucia
- St. Martin
- St. Pierre & Miquelon
- Svatý Vincenc a Grenadiny
- Súdán
- Surinam
- Svalbard & Jan Mayen
- Švédsko
- Švýcarsko
- Sýrie
- Tchaj-wan
- Tádžikistán
- Tanzanie
- Thailand
- Timor-Leste
- Jít
- Tokelau
- Tonga
- Trinidad & Tobago
- Tunisko
- Turecko
- Turkmenistán
- Ostrovy Turků a Caicos
- Tuvalu
- Americké odlehlé ostrovy
- Americké Panenské ostrovy
- Uganda
- Ukrajina
- Spojené arabské emiráty
- Velká Británie
- United States
- Uruguay
- Uzbekistán
- Vanuatu
- Vatikán
- Venezuela
- Vietnam
- Wallis & Futuna
- Západní Sahara
- Jemen
- Zambie
- Zimbabwe














