Toto řízení je termín používaný pro soubor komponentů, spojek, které umožní vozidlu sledovat požadovaný směr. Výjimkou je případ železniční dopravy, u které kolejové tratě v kombinaci s výhybkami zajišťují řídící funkci. Nejběžnějším uspořádáním řízení je natáčení předních kol pomocí ručně ovládaného volantu, který je umístěn před řidičem. Jiná uspořádání se někdy vyskytují na různých typech vozidel, například oj je řízení zadních kol.
Pásová vozidla, jako jsou tanky, obvykle využívají diferenciální řízení, to znamená, že se pásy pohybují různými rychlostmi nebo dokonce v opačných směrech, aby došlo ke změně kurzu. U kabrioletu řízení čtyř kol se třemi režimy řízení lze podle potřeby změnit, což pomáhá při parkování v hustém provozu, při projíždění oblastí, kde je potřeba krátký poloměr otáčení a při jízdě v terénu
ÚVOD
Manipulaci s vozidly v dnešní době ztěžuje stav rostoucího silničního provozu. Současný scénář vyžaduje prozkoumání nového mechanismu ovládání vozidla, což nás zase nutí najít alternativní způsob namísto současného systému nebo upravený mechanismus řízení pro lepší ovládání. Zatímco vozidlo vjíždí do ucpané nebo úzké oblasti, nebyl by nikdo, kdo by si nepřál, kdyby mohl zmenšit poloměr otáčení svého vozidla nebo kdyby mohl celé vozidlo posunout do strany, aniž by vozidlo otočil. Zde přichází aplikace tří režimů zaměnitelného řízení čtyř kol, které poskytuje totéž řízením zadních kol, jako je náš požadavek.
Pomocí tohoto systému lze v případě potřeby natáčet i zadní kola vzhledem ke směru předních kol. Vozidlo tak lze efektivněji ovládat zejména při zatáčení, parkování. Když se přední i zadní kola natáčí stejným směrem, říká se, že jsou ve fázi. Když jsou přední a zadní kola řízena opačným směrem, nazývá se to protifáze, protifáze nebo protifáze. Náš projekt se soustředí na pokrok v systému řízení automobilu s cílem výrazně zmenšit poloměr otáčení až na 45 – 55 %, čímž se sníží prostor potřebný k otáčení a poskytne pohyb do stran pro snadnější parkování a snížení námahy řidiče a zacházení.
NAVRHOVANÁ METODIKA
Před paralelním parkováním a změnou jízdního pruhu při vysoké rychlosti se dosáhne natáčením obou kol stejným směrem. Vozidlo se má otočit v krátkém poloměru otáčení natočením obou kol opačným směrem.
EXPERIMENTÁLNÍ NÁVRH A VÝSLEDEK TESTU
Pohled shora
Boční pohled
VÝSLEDEK TESTU
Ackermanův mechanismus řízení: S dokonalým Ackermannem bude střed všech kružnic vytyčených všemi koly při jakémkoli úhlu natočení ležet ve společném bodě. To však může být v praxi obtížné zařídit s jednoduchými táhly. Moderní vozy proto nepoužívají čistě Ackermannovo řízení, částečně proto, že ignoruje důležité dynamické a poddajné efekty, ale princip je dobrý pro manévry při nízké rychlosti Poloměr otáčení automobilu je průměr kruhu popsaného vnějšími koly při zapnutí plného zámku. Neexistuje žádný tvrdý a rychlý vzorec pro výpočet poloměru otáčení, ale můžete se přiblížit pomocí tohoto:
POLOMĚR OTOČNÉHO KRUHU = (TRAŤ/2) + (ROZLÍN/HŘÍCH (PRŮMĚRNÝ ÚHEL ŘÍZENÍ))
VÝSLEDEK A DISKUSE
U čtyřkolových vozidel se používají různé typy mechanismů ovládání řízení. Toto je také jeden z mechanismů řízení, který se používá pro třírežimový provoz podle požadovaných podmínek. Byl studován provoz a mechanismus této jednotky a její funkce. Na konci je mechanismus sestaven. Tento mechanismus je více výhodami jiných typů mechanismů řízení, protože má snazší ovládání a také menší časovou náročnost, snadnou manipulaci atd. Námi realizovaný projekt představoval působivý úkol v oblasti automobilového průmyslu. Je to velmi užitečné pro řidiče při řízení vozidla. Tento projekt také snížil náklady spojené s koncernem. Projekt byl navržen tak, aby splnil celý úkol požadavku, který byl také poskytnut.
PRINCIP PRÁCE
Náš projekt se skládá z nastavení řízení, čelních ozubených kol, kuželových kol a pojistné matice. Po odstranění pojistné matice se řízení provádí v normálním stavu. Jde pouze o řízení předních kol. Ale když je vložena pojistná matice, lze použít další dva režimy. Při zatlačení převodového ústrojí do jedné polohy se zařadí kuželová kola a je zajištěno řízení zadního kola ve stejném směru jako předních kol. Když se ozubené kolo přesune na druhou stranu, kuželové kolo se rozpojí a čelní kolo se zapojí. Díky uspořádání čelního ozubeného kola se zadní kolo natáčí v opačném směru než přední kolo. Výsledkem je řízení ve třetím režimu.
Tři režimy jsou,
B. Režim zmenšeného poloměru otáčení
A. Normální režim
Při zdolávání zatáčky bude podmínka dokonalého valivého pohybu splněna, pokud jsou všechny čtyři osy kol promítnuty do jednoho bodu nazývaného okamžitý střed. Po odstranění pojistné matice se řízení provádí v normálním stavu. Jde pouze o řízení předních kol.
B. Režim zmenšeného poloměru otáčení
Ve 3. provozním režimu, když je vložena další pojistná matice. Uspořádání ozubeného kola se přesune na druhou stranu, kuželové kolo se rozpojí a čelní kolo se zařadí. Díky uspořádání čelního ozubeného kola se zadní kolo natáčí v opačném směru než přední kolo. Výsledkem je řízení ve třetím režimu.
C. Klouzavý režim
V provozu 2. režimu, kdy je vložena pojistná matice, lze použít další dva režimy. Při zatlačení převodového ústrojí do jedné polohy se zařadí kuželová kola a je zajištěno řízení zadního kola ve stejném směru jako předních kol. Obr ukazuje provoz druhého režimu.
ZÁVĚRY
Děláme tento projekt zcela odlišným od ostatních projektů. Vzhledem k tomu, že koncepty zahrnuté v našem projektu jsou zcela odlišné, je k různým účelům používána jedna jednotka, kterou nevyvíjí žádný jiný člen týmu. Námi realizovaný projekt přinesl působivý úkol v oblasti automobilového průmyslu. Je to velmi užitečné pro řidiče při řízení vozidla. Tento projekt také snížil náklady spojené s koncernem. Projekt byl navržen tak, aby splnil celý úkol požadavku, který byl také poskytnut. Realizací tohoto projektu jsme získali znalosti o různých mechanismech, pohonech, výrobě se svařováním a o tom, jak jej lze efektivně využít k ovládání řízení lehkých motorových vozidel.
Projekt provedl S.Riyaz Haja Mohideen
REFERENCE
[1]. Zpráva o řízení čtyř kol, http://www.scribd.com/doc/34677964/Four-Wheel- Steering-report,
[2]Řízení čtyř kol, http://www.wisegeek.com/whatis- řízení čtyř kol.htm, staženo dne
[3] Řízení čtyř kol, http://whatwhenhow. com/automobil/řízení čtyř kol- 4wsautomobile/,
[4]. „Honda Prelude Si 4WS: Nikdy vás nenavede špatně,“ Car and Driver, sv. 33, č. 2, pps. 40–45,
[5]. Sano a kol., „Provozní a konstrukční vlastnosti systému řízení čtyř kol závislého na úhlu řízení“. 11. mezinárodní konference o experimentálních bezpečnostních vozidlech, Washington D C1988, 5P.
Řídicí a řídicí systémy
Automatický pilot
Popsaný automatický pilot je Sperry Marine Model: ADG 300 VT

Sestava řízení kormidla se skládá z kola kormidla, sestavy displeje, sestavy spínače a tří potenciometrů. Potenciometry obsažené v jednotce jsou poháněny přes ozubení připevněné ke kolu kormidla. Pořadí kormidla se zobrazuje číselně pomocí překryvného přepínacího panelu pomocí dvou 7segmentových displejů. Osvětlené šipky pod sedmi segmentovými displeji označují pořadí, směr a hrubou velikost kormidla. Pořadí kormidla je nastavitelné pro maximální úhly kormidla 20° až 75°.
Poměr pořadí kormidla k úhlu kola je proměnný. Pohyb kola blízko středu lodi, kde je žádoucí jemné ovládání, dává kormidlu příkazy podobné tomu, které by poskytla běžná kormidla s přibližně čtyřmi otáčkami natvrdo až natvrdo. U této kormidla s proměnným poměrem je však poměr řádu kormidla k úhlu kormidla při vyšších hodnotách, kde není vyžadováno jemné ovládání kormidla, logaritmicky zvýšen, takže celkový rozsah zdvihu kormidla lze objednat za méně než jeden celý. otočení kola.
Přepínač volby na sestavě displeje umožňuje konfiguraci kormidla pro lineární nebo nelineární kormidelní zařízení. Výběr nelineárního režimu umožňuje instalačnímu technikovi kalibrovat zobrazení pořadí kormidla pomocí trimovacích potenciometrů pro úpravu zobrazeného pořadí kormidla tak, aby odpovídalo nelineární převodovce řízení.
Vstup přepínače režimu z řídicího systému řízení do sestavy řízení kormidla se používá k aktivaci nebo deaktivaci zobrazení pořadí kormidla. Při ovládání systému řízení v režimu bez kormidla umožňuje přepínač PREVIEW kormidelníkovi krátkodobě zobrazit úhel kormidla, který by byl nařízen, když je kormidlo opět vybráno jako ovládací zařízení. Pro ovládání jasu jsou k dispozici tlačítka stmívače. Umožňují nastavení úrovně intenzity displejů na jednotce při ovládání systému řízení v jakémkoli režimu.
Kolečko kormidla poskytuje vstupy pořadí kormidla pro řízení lodi, když je zvolen režim řízení HAND. Kormidlo umožňuje otáčení o 160 � 5 � v každém směru od středu.
Kormidlo je namontováno na hřídeli opatřené ozubeným kolem, které mechanicky pohání proměnné rezistory. Kolečko kormidla a odlitek mají značky, které ukazují středovou polohu kol kormidla. Náboj také obsahuje hash značky, které ukazují 5� a 10� odpovídající lineárnímu 35� systému řízení kormidla.
Tři potenciometry jsou mechanicky vyrovnány s kolem kormidla pomocí ozubení. Dva samostatné potenciometry se používají jako vstup kormidla pro duální systém řízení a třetí potenciometr poskytuje úhel kormidla k sestavě displeje pro zobrazení pořadí a směru kormidla. Část potenciometru poskytuje alarm selhání řízení.
Sestava displeje je obvodová deska založená na mikrokontroléru, která poskytuje digitální čtení mimo pořadí kormidla (ve stupních). Obsahuje LED světelné lišty, které zajišťují osvětlení panelu sestavy spínače. Sestava displeje obsahuje světelné pruhy LED, které svítí za šipkami na sestavě spínače. Šipky označují směr otáčení kola a přibližnou polohu (mimo střed, 1/3, 2/3 a plný převis). Sestava displeje také obsahuje obvody pro stmívání LED a obsahuje obvody pro test lampy a funkce poradce kormidla.
Sestava přepínače obsahuje tři přepínače (PREVIEW, TEST a DIMMER), související legendy pro přepínače a pro LED diody HELM ORDER a osm indikačních šipek, které jsou osvětleny světelnými pruhy LED na sestavě displeje (čtyři pro levoboku a čtyři pro pravobok ). Osvětlení zadního panelu sestavy spínače je zajištěno LED diodami namontovanými na sestavě displeje.
Kormidelní stojan, který je situován ve středu kormidelny přímo k portu manévrovací konzoly, je polohou, ze které bude běžně probíhat ruční a automatické řízení plavidla. Stojan je na zadní straně osazen kolečkem, které kormidelník využívá ve spojení s ukazatelem úhlu kormidla a displejem gyrokompasu k řízení plavidla.
Magnetický kompas je vhodně umístěn na palubě nad řídicím stojanem spolu s hlasovou trubicí pro komunikaci a ovládání v případě poruchy gyra. Kartu kompasu lze pozorovat periskopem s nastavitelnými reflektory, které poskytují dobrý pozorovací úhel. Osvětlení pro kompasovou kartu je napájeno z nouzového zdroje.
Řízení ručním kolem je navazujícího typu. Kormidelník přestaví ruční kolo do polohy kormidla a kormidlo dojede do požadovaného úhlu, který je zobrazen na ukazateli úhlu kormidla.
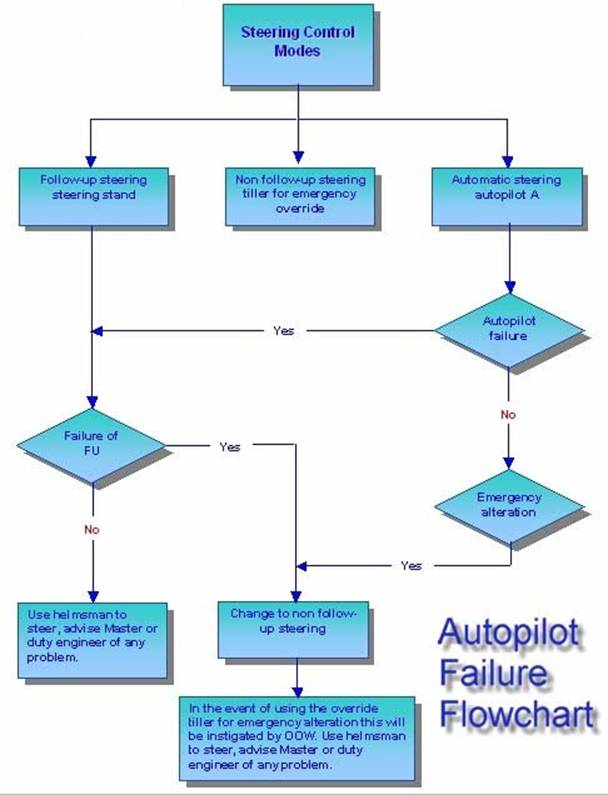
Přepínač na ovládací konzole kormidelny se používá k nastavení režimu řízení buď na AUTO , FU (stojan řízení) nebo NFU (bez návazné oje). V FU (režim sledování) se kormidlo zastaví při dosažení zvolené polohy. V případě NFU řízení kormidla se kormidlo pohybuje v předem zvoleném směru, dokud je kormidlo ovládáno. Polohu kormidla lze v tomto případě ověřit pozorováním ukazatele úhlu kormidla.
Provozní režimy autopilota�
Autopilot má opatření pro indikaci automatického i manuálního režimu řízení. Automatické řízení lze provádět z následujících tří různých automatických režimů řízení
Provádí automatické udržování kurzu pomocí dat kurzu z gyrokompasu a nastavení pořadí operátora. ADG 3000 monitoruje dynamické parametry, jako je rychlost a směr, aby neustále přizpůsoboval výstup řízení řízení, aby zajistil držení kurzu s minimálním pohybem kormidla, a tedy maximální účinnost.
Režim řízení, který provádí automatické udržování hlavy pomocí vstupů z externího navigátoru k nasměrování lodi směrem k navigačnímu bodu. Režim NAV volí autopilot, když je přepínačem MODE zvoleno AUTO. Režim NAV se liší od režimu AUTO v tom, že směr řízení určuje externí navigační systém. Externí navigační systém poskytuje data o pořadí kurzu použitá namísto vlastních dat kurzu ADG 3000. Loď je řízena přímo k navigačnímu bodu nastavenému externím navigačním systémem a udržuje tento kurz k navigačnímu bodu.
Režim řízení, který provádí automatické udržování hlavy pomocí vstupů z externího navigátoru, korigovaný na chybu křížení dráhy autopilotem, aby řídil loď směrem k traťovému bodu přes určenou dráhu nad zemí.
Režim Non-Follow Up (NFU).
Toto je nejzákladnější ze všech režimů řízení a volí se přepínačem MODE. Tento režim umožňuje obsluze nejpřímější kontrolu průtoku oleje čerpadla převodky řízení do akčních členů řízení. Ovládání ovladače NFU způsobí, že se kormidlo otáčí doleva nebo doprava, dokud je ovladač držen v levé nebo pravé poloze. Po uvolnění řízení zůstává kormidlo v klidu a drží se v poloze, dokud není znovu ovládán NFU ovladač nebo dokud se režim řízení nezmění na režim sledování. Nastavení úhlu kormidla do požadované polohy se dosáhne tak, že kormidelník sleduje ukazatel úhlu kormidla a ovládá NFU ovládání vlevo nebo vpravo.
Autopilot je automaticky nakonfigurován do režimu NFU, když operátor přesune ovladač NFU do aktivního stavu.
Toto je manuální režim řízení (FFU) a volí se přepínačem MODE. Když obsluha změní polohu kormidla, kormidlo se začne pohybovat a pokračuje v pohybu, dokud nedosáhne nařízené polohy vyznačené na kormidle. Chcete-li vrátit kormidlo do střední polohy, musí být kormidlo ručně umístěno do polohy nula stupňů. Když je zvoleno HELM, autopilot přejde do pohotovostního režimu.
Autopilot v automatickém režimu �����������
Nastavte ovládací prvky autopilota na předním panelu na požadovaná nastavení pro tento režim.
Ověřte, že řídicí systém řízení zvolil autopilota.
Stisknutím přepínače STATUS vyberte režim AUTO. Když je zvolen režim AUTO, bude reakce autopilota záviset na předchozím použitém režimu. V každém případě nedochází k žádné změně v efektivním přechodu režimu směřování k řízení, tj. převod je hladký.
Otáčejte ovladačem ORDER, dokud se na digitálním displeji ORDER neobjeví požadovaný směr jízdy.
(Poznámka! ORDER a všechna nastavení ovládání lze kdykoli změnit během provozu v režimu AUTO.)
Adaptivní automatický pilot
Autopilot nepřetržitě monitoruje dynamiku řízení lodi a přizpůsobuje parametry generovaných řídicích signálů tak, aby poskytoval co nejúčinnější ovládání kormidla v souladu s kurzem lodi a zvoleným kurzem. Adaptivní povaha autopilota je poskytovat minimální pohyb kormidla, což udržuje stabilitu lodi a zároveň maximalizuje spotřebu paliva.
Monitor kurzu a alarm mimo kurz
Monitor kurzu a alarm mimo kurz jsou dva knoflíky, které lze ručně nastavit v závislosti na podmínkách na moři a hustotě provozu.
Alarm mimokursu je v podstatě jednoduchý knoflík, který lze nastavit na libovolnou hodnotu počtu stupňů, o které si navigátor přeje, aby byl alarmován, když autopilot odkloní od kurzu.
Za klidného počasí může být alarm nastaven na nízkou hodnotu 5 � . Pokud je tedy řízený kurz v kterémkoli směru posunut o více než 5 �, spustí se alarm.
Nízká hodnota 5 � by však nebyla příliš proveditelná, pokud by se postupovalo v těžkém počasí, protože i s adaptivním systémem autopilota by kurz zcela jistě vybočoval z kurzu o více než 5 � velmi často, protože taková vyšší hodnota by musela být nastavena řekněme 10 �
Výběr je tedy ponechán na navigátorovi.
Nízká hodnota na alarmu mimo kurz na rozbouřeném moři by navíc více zatížila kormidelní zařízení, které by reagovalo příliš rychle a příliš často na to, aby udrželo plavidlo v kurzu.
Druhý alarm – alarm sledování kurzu umožňuje ruční nastavení kormidla kormidla a ovládání stáčení. Tyto dva jsou na některých systémech propojeny a nastavení jednoho ovlivňuje druhé. Tyto dva je třeba nastavit se zkušenostmi a po nahlédnutí do návodu.
Nesprávné nastavení tohoto ovládání ovlivní kvalitu udržování kurzu autopilota a dokonce i na klidném moři by byl přijímán častější poplach mimo kurz.
Testování před odjezdem lodi
Ačkoli to není konkrétně zmíněno v SOLAS Ch-V, předpis 19-2, je třeba mít na paměti, že kvůli nedostatku pracovní síly je autopilot hlavní položkou pro plavbu na dlouhé vzdálenosti. Jako takový by měl tvořit součást hlavních testů ovládání řízení. Bez autopilota by plavidlo muselo řídit ručně, což by znamenalo zátěž pro lidskou sílu. To by vedlo k dalším faktorům, jako je špatná kvalita vyhlídky – protože kormidelník by vyžadoval odpočinek mezi kormidelními povinnostmi a očekávání, že mu pomůže s pozorovacími povinnostmi, by ohrozilo bezpečnost lodi.
Nařízení týkající se použití automatického pilota
SOLAS Ch-V Bezpečnost plavby
Pravidlo 19
Použití automatického pilota
a) V oblastech s vysokou hustotou provozu, v podmínkách omezené viditelnosti a ve všech ostatních nebezpečných navigačních situacích, kde je použit automatický pilot, musí být možné okamžitě zajistit lidské ovládání řízení lodi.
b) Za výše uvedených okolností musí mít strážní důstojník k dispozici bezodkladně služby kvalifikovaného kormidelníka, který bude kdykoli připraven převzít řízení.
c) Přechod z automatického na ruční řízení a naopak provede odpovědný pracovník nebo pod jeho dohledem.
(d) Ruční řízení musí být testováno po delším používání automatického pilota a před vstupem do oblastí, kde navigace vyžaduje zvláštní opatrnost.
� * Viz Doporučení o standardech výkonnosti pro automatické piloty přijaté organizací rezolucí A.342(IX).
Nařízení 19-1
Obsluha kormidelního zařízení
V oblastech, kde navigace vyžaduje zvláštní opatrnost, musí mít lodě v provozu více než jednu pohonnou jednotku kormidelního zařízení, pokud jsou takové jednotky schopny současného provozu.
Potřeba pravidelné kontroly automatického pilota, aby bylo zajištěno, že řídí správný kurz
Poskytnutí výstražného zařízení mimo kurz spolu s adaptivním autopilotem nezbavuje navigátora jeho povinnosti. A jeho primární povinností na můstku při navigaci je navigovat. To znamená, že musí zajistit, aby byl veden správný kurz. Ať už ručně nebo autopilotem. V pilotážních vodách je kurz řízen ručně a navigátor průběžně sleduje kurz řízený společně s pilotem. Toto nepřetržité monitorování je nezbytné, protože kormidelník může zakolísat nebo může selhat zařízení nebo může dojít k chybě komunikace. Povolená reakční doba je nízká vzhledem k těsné blízkosti nebezpečí a je nutné nepřetržité monitorování.
Na otevřeném moři po přepnutí řízení z manuálního na automatické může odpadnout potřeba bedlivě sledovat, jak je požadováno u vodách lodivodů, ale to neznamená, že by navigátor zapomněl na svou primární povinnost. Pro kontrolu není nastaven žádný časový interval, ale je vyžadováno neustálé sledování, které může zahrnovat vizuální znaky – z mytí vrtule na zádi, nebeská tělesa, jakékoli cvakání, pokud je vydáváno kompasem. A samozřejmě časté návštěvy kontrolního stánku.
Ruční testování alespoň jednou za hodinky
Autopilot by měl být alespoň jednou testován ručně. Měly by být provedeny všechny funkční testy. A proběhly různé změny systému na jiné režimy. Alarmy by měly být spuštěny, abyste viděli, že mechanismus alarmů funguje správně. Knoflík monitoru by měl být otestován, abyste viděli vychýlení a úhel směrového kormidla dodávaný při udržování kurzu.
Faktory, které je třeba vzít v úvahu při přechodu na ruční ovládání řízení, aby bylo možné řešit potenciálně nebezpečnou situaci
Kromě výše uvedených poruch je třeba poznamenat také následující:
Při jakékoli pravděpodobnosti blízkého/hustého provozu by mělo být ovládání přepnuto na manuální. Zvláště pokud na otevřeném moři při míjení lodi na konci situací, nebo při předjíždění nebo při předjíždění.
Veškerý tranzit přes TSS by měl být na ručním řízení. Jakýkoli průjezd, kde je traťová čára blízko nebezpečí, kdy by reakční doba byla dostatečná k přijetí nouzových opatření, řízení by mělo být manuální. Na rozbouřeném moři, pokud je plavidlo ponecháno řídit mírně vychýlený kurz, zabrání poškození přední části. A je rozumné přejít na manuální a setkat se s hřebeny vln, jak přicházejí.
Lepší představu by poskytl příklad kolize:
Velitel kontejnerové lodi v TSS u Cabo de Finisterre opustil most o půlnoci a předal jej 2. důstojníkovi. Moře bylo klidné a před námi byla pouze jedna loď ve vzdálenosti 10 NM. Vzdálenost mezi oběma loděmi byla udržována, což znamená, že lodě měly stejnou rychlost.
2. důstojník a kormidelník byli na hlídce. Řízení bylo v pořádku a 2. důstojník po nějaké době odešel do mapovací místnosti opravit mapy. Kolem 0200:2 kormidelník, který se zdvojnásobil jako hlídka, hlásil, že loď před námi je velmi blízko, protože světla byla velmi jasná. 2. důstojník vyběhl ven a byl omráčen jasnými světly zádi druhé lodi. Druhé plavidlo bylo v pořádku na levé straně vlastního plavidla. Okamžitě zavelel na pravobok. Kormidelník otočil volantem na pravobok, poté hlásil, že řízení nereaguje. XNUMX. důstojník poté nařídil pevný port� vypukla panika. Pak si uvědomil, že plavidlo je stále na autopilotu. Jakmile bylo ovládání přepnuto na ruční, loď se otočila doleva, protože kormidlo bylo již obtížně nakloněno. Plavidla se srazila. Levá příď vlastního plavidla narazila do pravoboku tankeru před nimi a oba utrpěly vážné poškození.
Výše uvedené zdůrazňuje potřebu včasného přepnutí ovládání na ruční, aby se předešlo takové nehodě.
















