Níže jsou mé myšlenky na samoparkovací systém po jeho každodenním používání po dobu asi tří měsíců.
Stojí za ty peníze a určitě je to diferenciátor, pokud musíte neustále parkovat paralelně, ale není to nutnost.
Své první auto jsem si koupil na začátku roku 2011. Kdysi byly záložní kamery v ekonomických autech vzácné, obvykle byly součástí navigačního balíčku, který stál kolem 2 XNUMX $. Když jsem se dozvěděl, že je to možnost, rozhodl jsem se, že si s tím musím pořídit auto, ačkoli moje tehdejší žena protestovala a říkala, že to za ty peníze nestojí. Ale prostě jsem viděl, jak by mi to usnadnilo život, protože bych to musel neustále parkovat paralelně. Poté, co jsme testovali auto se zadní kamerou, změnila názor a já jsem dostal naložené auto s navigací a samozřejmě kamerou. Moje bývalá manželka se často zmiňovala o tom, jak dobře bylo, že jsem trval na pořízení zadní kamery.
Rychle vpřed do roku 2019, kdy jsem se chystal koupit nový kompaktní crossover a měl jsem na mysli několik možností. Když jsem se dozvěděl, že Cherokee má možnost samoparkování (to neměl žádný z ostatních kandidátů), dovedete si představit, že mě to docela zaujalo. Avšak na rozdíl od couvací kamery, u které jsem viděl, jak užitečná by mohla být, zde jsem byl skeptičtější, protože mi nebylo jasné, jak dobře bude fungovat v praxi. Na internetu jsem nenašel mnoho informací, které by to vrhly více na světlo. Tak jsem se rozhodl, že to nenechám být primárním faktorem při mém výběru, ale stejně jsem skončil u Cherokee. Od té doby, co jsem dostal auto, jsem byl rozhodnutý přijít na systém samoparkování a užil jsem si při tom spoustu zábavy. Krátce poté, co jsem dostal auto, jsem udělal další velké rozhodnutí – konečně opustit město za pohodlím (a nudou) na předměstí, ale přesto jsem byl rozhodnutý využít systém automatického parkování, jak jen to půjde, a dostat své peníze za své. z toho. Je to už nějakou dobu, co jsem to pravidelně používal, ale hej, proč nenapsat recenzi a možná pomoci někomu, kdo by se tím mohl zabývat.
* Velmi užitečné pro těsná (ale ne příliš těsná? – viz později) místa. Zaparkujte s jistotou – už žádné vícenásobné pokusy, skončit daleko od chodníku, narazit na chodník nebo dokonce opustit toto vzácné, ale těsné místo.
* Dělá z paralelního parkování automatickou, bezduchou práci. Skvělé po té dlouhé vyčerpávající jízdě v ucpaných ulicích plných maniaků.
* Nechte počítač rozhodnout, zda je toto úzké místo skutečně místo nebo příliš malé. Už žádné přeskakování toho dokonalého místa, protože vypadá malé, nebo marné pokusy zaparkovat na místě, které je prostě příliš krátké.
* Zvýšená efektivita v úzkých místech, protože počítač posouvá auto více dopředu, než je mi příjemné, vzhledem k tomu, že není přední kamera.
* Je to prostě cool.
* Chce to trochu cviku, abyste si zvykli a dokázali to spolehlivě používat.
* I po tréninku je to poněkud neohrabané a někdy vybíravé.
* Používání trvá déle než ruční provádění na snadných místech.
* Existují situace, kdy se chová neočekávaně nebo jej nemůžete použít (o několik příkladů později), a pokud nebudete opatrní, mohli byste potenciálně způsobit poškození.
* Pokud jej používáte neustále, můžete zapomenout (nebo se nenaučíte), jak to udělat sami! Což je problém, pokud musíte (viz výše).
Jak to funguje
Toto je spíše recenze než návod, jak to funguje, takže zde jsou příslušné podrobnosti. Když jste připraveni zaparkovat, stiskněte tlačítko, které aktivuje systém. Nyní bude během jízdy hledat parkování. Můžete zadat rovnoběžné nebo kolmé a vlevo nebo vpravo. Výchozí (zapomeňte, jestli se to dá změnit?) je paralelní parkování na pravé straně, což stejně používám nejvíc. Jakmile je systém zapnutý, nemůžete jet rychleji než 18 mph nebo se vypne. Když systém najde místo, upozorní vás a začne dávat pokyny, počínaje pohybem vpřed a poté zastavením. Parkovací systém ovládá kolo, ale vy máte na starosti plyn/brzdu a řazení mezi jízdou/zpátečkou/parkováním. Počítač vám při parkování řekne, kdy máte zastavit a přeřadit. Jakmile rozhodne, že jste zaparkovali, oznámí vám, že parkování je dokončeno.
Moje zkušenost
Určitě to nějakou dobu trvalo, než jsem si zvykl. Existuje několik klipů na Youtube, které ukazují, že to někdo zkouší poprvé a šílí z toho, že se kolo otáčí samo. Nijak zvlášť jsem na to nereagoval. Ale zároveň se toho děje tolik: sledovat pokyny, dívat se na jedoucí auto a ujistit se, že vás počítač nesrazí, spousta různých druhů pípání. Na začátku to bylo všechno velmi zdrcující. Zpočátku jsem si myslel, že se nebudu muset starat o kolo a odhadovat vzdálenosti, pak budu moci věnovat větší pozornost tomu, kam auto jelo, abych nikoho nesrazil. Ale veškerá akce na to ponechala velmi malou mozkovou kapacitu a zjistil jsem, že jdu velmi pomalu ze strachu, že do něčeho narazím. Trvalo hodně času si na to zvyknout a zaparkovat běžnější rychlostí.
Také to vyžadovalo hodně praxe, aby bylo možné přimět auto k zahájení procesu parkování. Prostě nemám trpělivost jet pod 18 mph při hledání parkování. Také jsem zjistil, že pokud jedete do 18 let, systém bude stále vynechávat spoustu míst, pokud jedete na jeho vkus příliš rychle (nevím, jaké by to bylo číslo). Systém navíc hledá místo vždy jen na jedné straně a měl jsem spoustu jednosměrných ulic, kde se dalo zaparkovat na obou stranách. A aby to fungovalo co nejlépe, musíte být rovnoběžní a blízko zaparkovaných aut. Když jsem to všechno vzal dohromady, rychle jsem opustil fantazii, že budu jen chladně křižovat, dokud mi počítač neřekne, abych přestal. Místo toho jsem vyvinul následující systém:
1. Jeďte a hledejte parkování normální rychlostí (vypnutý parkovací systém) a dívejte se dopředu na potenciální místa.
2. Pokud se najde potenciální místo, zpomalte téměř na plazení, když se téměř dostanete na začátek místa.
3. Zapněte parkovací systém a pomocí levého indikátoru, pokud je místo vlevo, řekněte počítači, aby se podíval vlevo.
4. Pokračujte v procházení, dokud mi počítač, doufejme, neřekne, že to místo našel.
Není to nejhladší zážitek a je trochu nepříjemné, když se z potenciálního místa stane hydrant nebo cokoli jiného, ale tímto způsobem to místo většinu času najde, řekněme 97 %. Ale ne vždy!
Některé situace, které ukazují omezení a zvláštnosti systému:
* https://jeepcherokeeclub.com/4-2014-jeep-cherokee-general-discussion/125834-parallel-park-assist-issue-my-thoughts.html#post1414090
* Jednou jsem zkusil zaparkovat za autem, které mělo hned za sebou zaparkované kolo. Zdálo se, že moje auto míří ke kolu, takže jsem zastavil, když do něj mělo narazit.
* Jednou při jízdě po široké jednosměrné ulici jsem si v poslední vteřině všiml místa na druhé straně, než jsem byl, a tak jsem se k místu přiblížil diagonálně. Nebyl jsem si jistý, jestli to bude fungovat, ale počítač to místo našel! jen zaparkovat daleko od chodníku pod velmi velkým úhlem.
* Před místem bylo dvakrát zaparkované auto. Bylo to dost daleko na to, abych mohl ručně zaparkovat paralelně. Před zahájením parkovacího procesu se však systém rád posouvá hodně dopředu. A bohužel jsem nemohl jet dost daleko kvůli dvakrát zaparkovanému autu. Takže jsem musel zaparkovat auto sám (ta hrůza, já vím).
* Jednou, když pršelo, počítač místo nenašel. Nevím, že to bylo kvůli dešti, ale manuál varuje, že to nemusí fungovat za silného deště/sněžení.
Celkově je tedy docela vzácné, že systém udělá něco divného, ale stává se to, a tak musíte být neustále ve střehu.
Jak pevně se dá zaparkovat?
Nevím. Manuál k tématu mlčí. Několikrát jsem zaparkoval na místech, která vyžadovala několik kol přeřazení mezi jízdou a zpátečkou, a cítil jsem se velmi napjatý, ale na každé straně zbylo jako noha. V příloze je obrázek jednoho z nejtěsnějších míst, kde jsem zaparkoval. Manuál zmiňuje, že systém umožňuje nespecifikovaný maximální počet řazení mezi jízdou a zpátečkou a že systém se zastaví, pokud je tohoto maxima dosaženo. Tohle se mi nikdy nestalo. Není mi jasné, zda jsem dosáhl limitů velikosti spotu a počítač ignoroval nějaké menší body, nebo jsem prostě neměl to štěstí najít místo, které je právě tak malé, aby počítač dosáhl maximálních schopností. Také si nejsem jistý, že bych vůbec chtěl zaparkovat své nové a nablýskané auto v něčem těsnějším.
Není to dokonalý systém a trvalo mi hodně času, než jsem si na něj zvykl, ale také mi to usnadnilo život. Zejména v úzkých, ale také to jen přidalo prvek zábavy a relaxace každý den, když jsem se vracel domů po dalším vyčerpávajícím dojíždění. Kdybych si kupoval auto znovu a stále bydlel ve městě, dal bych nějaké dobré bonusové body každému autu, které má takový systém. Ale nakonec bych bez toho mohl žít, zvláště kdyby auto mělo přední kameru / 360° (proč to nedali do Cherokee). Bavila jsem se, dokud to trvalo, i když je teď mnohem příjemnější zaparkovat v mé garáži, místo abych se musel starat o parkování na ulici. Ale jednou za čas se přistihnu, že musím paralelně parkovat, což mi umožňuje oprášit dovednosti, které jsem tak stěží získal a které si připomínám v časech, které se nevrátí.

2022 Jeep Grand Cherokee ParkSense Uživatelská příručka aktivního parkovacího asistenta

AKTIVNÍ PARKOVACÍ ASISTENČNÍ SYSTÉM PARKSENSE — POKUD JE VE VÝBAVĚ
Systém aktivního parkovacího asistenta ParkSense má pomáhat řidiči při paralelních a kolmých parkovacích manévrech identifikací správného parkovacího místa, poskytováním zvukových/vizuálních pokynů a ovládáním volantu. Systém aktivního parkovacího asistenta ParkSense je definován jako „poloautomatický“, protože řidič ovládá plyn, volič převodovky a brzdy. V závislosti na volbě parkovacího manévru řidiče je systém aktivního parkovacího asistenta ParkSense schopen vjet s vozidlem do rovnoběžného nebo kolmého parkovacího místa na obou stranách (tj. na straně řidiče nebo spolujezdce).
POZNÁMKA:
- Řidič je vždy odpovědný za ovládání vozidla, odpovídá za jakékoli okolní předměty a musí zasáhnout podle potřeby.
- Systém je navržen tak, aby řidiči pomáhal, a nikoli jej nahrazoval.
- Pokud se během poloautomatického manévru řidič dotkne volantu poté, co dostal pokyn sundat ruce z volantu, systém se zruší a řidič bude muset parkovací manévr dokončit ručně.
- Systém nemusí fungovat za všech podmínek (např. podmínky prostředí, jako je silný déšť, sníh atd., nebo při hledání parkovacího místa, které má povrchy, které absorbují vlny ultrazvukového senzoru).
- Nová vozidla od autorizovaného prodejce musí mít najeto alespoň 30 mil (48 km), než bude systém aktivního parkovacího asistenta ParkSense plně zkalibrován a bude fungovat přesně. Důvodem je dynamická kalibrace vozidla pro zlepšení výkonu funkce. Systém bude také nepřetržitě provádět dynamickou kalibraci vozidla, aby zohlednil rozdíly, jako jsou přehuštěné nebo podhuštěné pneumatiky a nové pneumatiky.
ZAPNUTÍ A VYPNUTÍ SYSTÉMU PARKENSE ACTIVE PAR ASSIST SYSTEM
Systém aktivního parkovacího asistenta ParkSense lze aktivovat a deaktivovat pomocí spínače aktivního parkovacího asistenta ParkSense, který se nachází na panelu spínačů nad displejem Uconnect.
Chcete-li aktivovat nebo deaktivovat systém aktivního parkovacího asistenta ParkSense, stiskněte jednou spínač aktivního parkovacího asistenta ParkSense (LED se rozsvítí). Druhým stisknutím spínače systém deaktivujete
(LED zhasne).
Systém aktivního parkovacího asistenta ParkSense se automaticky vypne při kterékoli z následujících podmínek:
- Parkovací manévr je dokončen
- Při hledání parkovacího místa je rychlost vozidla vyšší než 18 km/h
- Rychlost vozidla je během aktivního navádění řízení do parkovacího místa vyšší než 5 km/h
- Při aktivním navádění řízení do parkovacího místa se dotýkáte volantu
- Spínač předního a zadního parkovacího asistenta ParkSense je stlačen
- Dveře řidiče jsou otevřeny
- Zadní výklopné dveře jsou otevřeny
- Elektronická kontrola stability/Zásah protiblokovacího systému brzd
Systém aktivního parkovacího asistenta ParkSense umožňuje maximální počet řazení mezi DRIVE a REVERSE. Pokud manévr nelze dokončit v rámci maximálního počtu směn, systém se zruší a displej sdruženého přístroje dá řidiči pokyn, aby manévr dokončil ručně.
Systém aktivního parkovacího asistenta ParkSense bude fungovat a vyhledávat parkovací místo pouze za následujících podmínek:
- Volič převodového stupně je v poloze DRIVE
- Zapalování je v poloze RUN
- Aktivuje se spínač aktivního parkovacího asistenta ParkSense
- Dveře řidiče jsou zavřené
- Zadní výklopné dveře jsou zavřené
- Rychlost vozidla je nižší než 15 mph (25 km/h)
- Rychlost vozidla je nižší než 25 km/h
- Vnější povrch a spodní strana předního a zadního obložení/nárazníků jsou čisté a zbavené sněhu, ledu, bláta, nečistot nebo jiných překážek
POZNÁMKA:
Pokud vozidlo jede rychlostí vyšší než přibližně 15 km/h, displej sdruženého přístroje dá řidiči pokyn, aby zpomalil. Pokud vozidlo jede rychlostí vyšší než přibližně 25 km/h, systém se vypne. Řidič pak musí systém znovu aktivovat stisknutím spínače aktivního parkovacího asistenta ParkSense.
Po stisknutí LED na spínači aktivního parkovacího asistenta ParkSense na okamžik zabliká a poté LED zhasne, pokud některá z výše uvedených podmínek není přítomna.
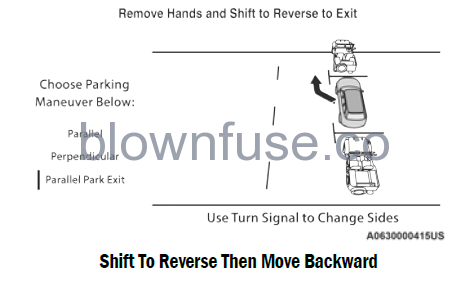
Pokud je vozidlo zařazené na jiný rychlostní stupeň než JÍZDA a je detekován objekt, systém automaticky přejde do režimu Parallel Park Exit. Na obrazovce rádia se objeví výzva a řidič bude muset vybrat „Ano“ nebo „Ne“ pro manévr Parallel Park Exit. Jakékoli jiné podmínky budou mít za následek výchozí manévr paralelního parkování.
PROVOZ ASISTENCE PARALELNÍHO/KAMÉHO PARKOVACÍHO MÍSTA
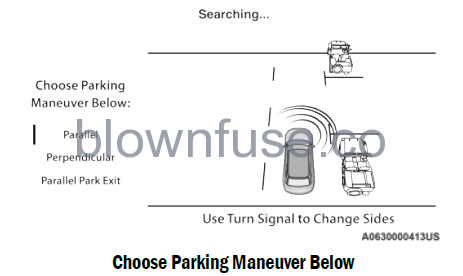
Když je aktivován systém aktivního parkovacího asistenta ParkSense, můžete si v systému Uconnect vybrat mezi manévry Parallel, Perpendicular a Parallel Park Exit.
POZNÁMKA:
- Při hledání parkovacího místa pomocí ukazatele směru vyberte, na které straně vozidla chcete parkovací manévr provést. Systém aktivního parkovacího asistenta ParkSense automaticky vyhledá parkovací místo na straně spolujezdce, pokud není aktivován ukazatel směru.
- Řidič se musí ujistit, že zvolené parkovací místo pro manévr zůstává volné a bez jakýchkoliv překážek (např. chodci, jízdní kola atd.).
- Řidič je odpovědný za to, že je na zvoleném parkovacím místě vhodné manévrovat a že se na něm nenachází nic, co by mohlo přečnívat nebo vyčnívat do parkovacího místa (např. žebříky, dveře zavazadlového prostoru atd. z okolních předmětů/vozidel).
- Při hledání parkovacího místa by měl řidič jet rovnoběžně nebo kolmo
(v závislosti na typu manévru) na jiná vozidla. - Tato funkce bude indikovat pouze poslední detekované parkovací místo (příklad: pokud projedete více volných parkovacích míst, systém ukáže pouze poslední detekované parkovací místo pro daný manévr).
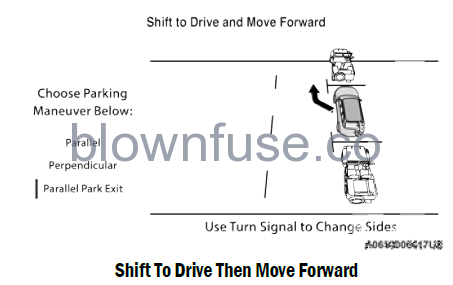
- Když je vozidlo v režimu DRIVE, na displeji Uconnect bude obraz na celé obrazovce. Pokud řidič při hledání parkovacího místa přeřadí na REVERSE, na displeji Uconnect se zobrazí obraz z kamery se zprávou „Shift To Drive“.
Když bylo nalezeno volné parkovací místo a vozidlo není na svém místě, budete vyzváni k pohybu vpřed a umístění vozidla pro kolmé nebo paralelní parkování (v závislosti na typu prováděného manévru).
Jakmile začne aktivní řízení, na displeji Uconnect se zobrazí obraz kamery s výzvami, které se budou zobrazovat po dobu trvání manévru.
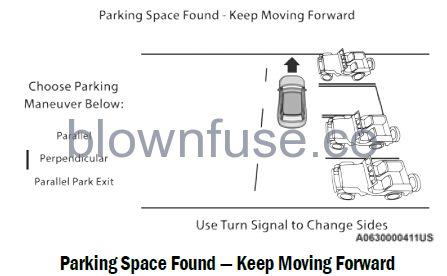
Nalezeno parkovací místo — Pokračujte vpřed
Jakmile bude vozidlo na svém místě, budete vyzváni, abyste zastavili pohyb vozidla a sundali ruce z volantu. Když se vozidlo zastaví (ruce stále sejmuté z volantu), budete vyzváni k přepnutí voliče převodovky do polohy REVERSE.
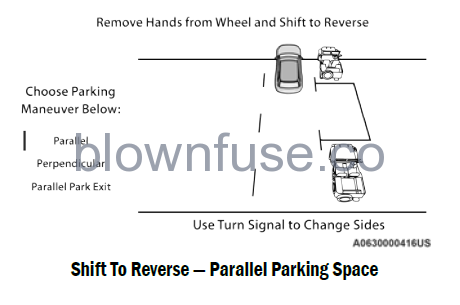
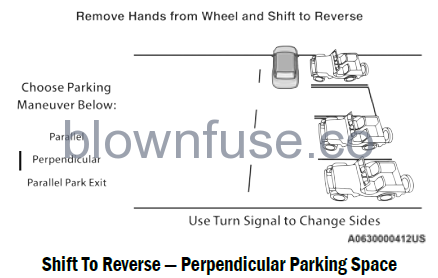
Řazení vzad — kolmé parkovací místo
Systém pak může dát řidiči pokyn, aby počkal na dokončení řízení a poté dal pokyn ke kontrole okolí vozidla a pohnul se dozadu.
Před dokončením parkovacího manévru bude řidič vyzván k několika dalším přeřazením (JÍZDA a ZPÁTEČKA), aniž by měl ruce z volantu, a přitom zkontroloval okolí vozidla.
Když je vozidlo v parkovací poloze, manévr je dokončen a řidič dostane pokyn, aby zkontroloval parkovací polohu vozidla a poté zařadil vozidlo do PARKOVÁNÍ. Na okamžik se zobrazí zpráva „Active ParkSense Complete – Check Parking Position“.
POZNÁMKA:
- Je povinností řidiče použít brzdu a zastavit vozidlo. Řidič by měl zkontrolovat své okolí a být připraven zastavit vozidlo buď na pokyn, nebo když je vyžadován zásah řidiče.
- Za použití brzdy a plynu během poloautomatického parkovacího manévru je odpovědný řidič.
- Když systém dá řidiči pokyn, aby sundal ruce z volantu, měl by řidič zkontrolovat své okolí a začít pomalu couvat.
- Systém aktivního parkovacího asistenta ParkSense umožní maximálně osm řazení mezi DRIVE a REVERSE. Pokud manévr nelze dokončit během osmi směn, systém se zruší a displej sdruženého přístroje dá řidiči pokyn, aby manévr dokončil ručně.
- Systém zruší manévr, pokud rychlost vozidla překročí 5 mph (7 km/h) během aktivního navádění řízení do parkovacího místa. Systém poskytne řidiči varování při rychlosti 3 mph (5 km/h), které mu řekne, aby zpomalil. Řidič je pak odpovědný za dokončení manévru, pokud je systém zrušen.
- Pokud je systém během manévru z jakéhokoli důvodu zrušen, musí řidič převzít kontrolu nad vozidlem.
VAROVÁNÍ!
- Řidiči musí být opatrní při provádění paralelních nebo kolmých parkovacích manévrů, i když používají systém aktivního parkovacího asistenta ParkSense. Vždy pečlivě zkontrolujte za a před svým vozidlem, dívejte se za sebe a před sebe a před couváním a pohybem vpřed nezapomeňte zkontrolovat chodce, zvířata, jiná vozidla, překážky a mrtvé úhly. Jste odpovědní za bezpečnost a musíte i nadále věnovat pozornost svému okolí. Pokud tak neučiníte, může dojít k vážnému zranění nebo smrti.
- Před použitím systému aktivního parkovacího asistenta ParkSense se důrazně doporučuje odpojit sestavu kulového držáku a koule závěsu od vozidla, když se vozidlo nepoužívá k tažení. Pokud tak neučiníte, může dojít ke zranění nebo poškození vozidel nebo překážek, protože koule závěsu bude mnohem blíže k překážce než zadní panel, když vozidlo vydá nepřetržitý tón. Senzory by také mohly detekovat sestavu kulového držáku a koule závěsu v závislosti na jejich velikosti a tvaru, což by falešně signalizovalo, že za vozidlem je překážka.
POZOR!
- Systém aktivního parkovacího asistenta ParkSense je pouze pomocníkem při parkování a nedokáže rozpoznat každou překážku, včetně malých překážek. Parkovací obrubníky mohou být dočasně detekovány nebo nejsou detekovány vůbec. Překážky umístěné nad nebo pod senzory nebudou detekovány, pokud jsou v těsné blízkosti.
- Při použití systému aktivního parkovacího asistenta ParkSense musí vozidlo jet pomalu, aby bylo schopno včas zastavit, když je detekována překážka. Při používání systému aktivního parkovacího asistenta ParkSense se řidiči doporučuje dívat se přes rameno.
VÝJEZD Z PARKOVACÍHO MÍSTA
POZNÁMKA:
Funkce nefunguje pro výjezd z kolmého parkovacího místa, ale pouze pro výjezd z paralelních parkovacích míst.
Aktivace
Chcete-li tuto funkci aktivovat, stiskněte jednou spínač Active ParkSense. Po výběru se systém aktivuje a varuje řidiče na displeji sdruženého přístroje o operacích, které je třeba provést, aby manévr provedl správně.
Výběr Manévrové Strany
Pomocí ukazatelů směru vyberte směr, kterým chcete manévr provést. Pomocí indikátoru šipky vpravo proveďte manévr na pravou stranu a pomocí indikátoru šipky vlevo proveďte manévr doleva.
Během manévru systém dá řidiči pokyn, aby zařadil ZPĚT a použil směrové světlo ve směru, ze kterého chcete vyjet. Pusťte volant a použijte brzdový nebo plynový pedál podle pokynů, zatímco systém řídí řízení automaticky pro výjezd z parkovacího místa. Pokud řidič během výjezdového manévru pokračuje v dobrovolném nebo nedobrovolném úkonu na volantu (dotýká se nebo drží volantu, aby zabránil jeho pohybu), manévr se přeruší.
Konec Manévru
Poloautomatický manévr končí, když se na displeji zobrazí zpráva o dokončeném manévru. Na konci manévru systém vrátí řízení vozidla řidiči.













