Firmware letadla má schopnost ovládat pozemní řízení, pokud máte v letadle buď zadní kolo, nebo příďové kolo. Pozemní řízení je aktivováno ve všech režimech kromě MANUAL a při správném vyladění je mnohem snazší udržet letadlo na rovné dráze podél ranveje pro vzlet a přistání.
Pozemní řízení může být realizováno buď pomocí kola spojeného s výstupem RUDDER (SERVOx_FUNCTION =21), buď mechanicky nebo pomocí druhého serva, nebo pomocí vyhrazeného výstupu GroundSteering (SERVOx_FUNCTION =26). Pokud je přiřazen výstup GroundSteering, pak pracuje nezávisle na výstupu RUDDER, jinak výstup ovladače Ground Steering řídí RUDDER, když je pod GROUND_STEER_ALT .
Při nastavování pozemního řízení pro letadlo existují 4 klíčové parametry, které musíte mít správně. Tato příručka poskytuje soubor kroků, jak tyto parametry správně nastavit, aby vaše letadlo přesně sledovalo dráhu na zemi.
Ovládání řízení¶
Chcete-li povolit pozemní řízení, musíte nastavit parametr GROUND_STEER_ALT na něco nad nulou. Jedná se o barometrickou nadmořskou výšku nad počáteční nadmořskou výškou, ve které se řízení změní z pozemního řízení kola na řízení kormidla pro aerodynamické řízení. Doporučuje se nastavit tuto hodnotu na 5 metrů, abyste umožnili trochu barometrický drift.
Když je pozemní řízení aktivní, zamkne se na směr kompasu, kdykoli nemáte vstup pro směrovku nebo křidélka. Chcete-li tedy řídit letadlo na zemi při pojíždění, měli byste použít směrovku ke změně směru a poté sundat ruku z kormidla i křidélka, abyste udrželi aktuální kurz kompasu. Pozemní řízení bude správně fungovat pouze v případě, že máte zapnutý kompas.
KLÍČOVÉ PARAMETRY¶
- STEER2SRV_P : Toto říká kódu, jaký je průměr otáčení (jako průměr v metrech) pro vaše letadlo. Je důležité, abyste tento parametr správně uvedli, protože říká kódu, jaký úhel řízení zvolit pro dosažení požadované rychlosti otáčení.
- STEER2SRV_I : Toto je zisk z integrálu úhlu řízení. Zvýšení tohoto zesílení způsobí, že ovladač vyrovnává ustálené odchylky v důsledku vyladění vozidla.
- STEER2SRV_D : Nastavuje tlumení řídicí smyčky řízení. Toto zesílení pomáhá snížit chvění řízení s vibracemi. Mělo by se zvyšovat v krocích po 0.01, protože příliš vysoká hodnota může vést k vysokofrekvenčním oscilacím řízení, které by mohly vozidlo přetížit.
- STEER2SRV_IMAX : Toto omezuje počet stupňů řízení ve centistupních, nad kterými bude integrátor pracovat. Při výchozím nastavení 1500 centi-stupňů bude integrátor omezen na +- 15 stupňů zdvihu serva. Maximální výchylka serva je +- 45 centi-stupňů, takže výchozí hodnota představuje 1/3 celkové výchylky ovládání, což je dostatečné, pokud není vozidlo výrazně mimo vyvážení.
- STEER2SRV_MINSPD: Toto je minimální předpokládaná pozemní rychlost v metrech/s pro řízení. Minimální rychlost zabraňuje oscilacím, když se vozidlo poprvé rozjede. Vozidlo může stále řídit pomaleji, než je tento limit, ale výpočty řízení budou provedeny na základě této minimální rychlosti.
- STEER2SRV_TCONST: Toto řídí časovou konstantu v sekundách od požadovaného do dosaženého úhlu řízení. Hodnota 0.75 je dobrá výchozí hodnota a bude fungovat téměř se všemi rovery. Pozemní řízení v letadle potřebuje o něco menší časovou konstantu a hodnota 0.5 se doporučuje pro nejlepší pozemní ovládání v letadlech s pevnými křídly. Hodnota 0.75 znamená, že ovladač se pokusí opravit jakoukoli odchylku mezi požadovaným a skutečným úhlem řízení za 0.75 sekundy. Pokročilí uživatelé mohou chtít tento čas zkrátit, aby dosáhli rychlejší odezvy, ale nemá smysl nastavovat čas kratší, než může vozidlo dosáhnout.
- GROUND_STEER_ALT : Nadmořská výška, ve které se má použít pozemní ovladač řízení na směrovce. Pokud je nenulová, pak se ovladač STEER2SRV použije k ovládání směrového kormidla pro výšky pod tímto limitem vzhledem k domovské výšce.
KROK 1: NASTAVENÍ VÝCHOZÍCH PARAMETRٶ
Chcete-li zahájit proces ladění, nastavte následující hodnoty:
Toto jsou konzervativní hodnoty, které by vám měly poskytnout rozumné chování pro většinu LETADEL.
KROK 2: NASTAVENÍ ŘÍZENÍ2SRV_P ¶
Chcete-li nastavit parametr STEER2SRV_P, musíte změřit průměr kruhu otáčení vašeho letadla.
S vypnutým motorem přepněte letadlo do MANUÁLNÍHO režimu a dejte kormidlo na jednu stranu. Poté pomalu tlačte své letadlo do kruhu. Pomocí měřicí pásky změřte průměr tohoto kruhu a nastavte STEER2SRV_P na tuto hodnotu v metrech. Většina letadel má průměr otáčení kolem 4 metrů. Pokud je váš průměr otáčení daleko od 4, můžete mít špatně nastavené rychlosti nebo házení na směrovce.
Řešení problémů s tkaním¶
Běžným problémem u pozemního řízení je, že se řízení „plete“, spíše než plynule se otáčí ze strany na stranu. Důvodů, proč k tomu dochází, může být několik.
První věc, kterou musíte vyřešit, je, zda je problém omezen na nízkou rychlost nebo také ovlivňuje jízdu vyšší rychlostí. Pokud k problému dojde pouze při velmi nízké rychlosti, nejpravděpodobnějším problémem je, že STEER2SRV_MINSPD je příliš nízký. Výchozí hodnota je 1.0 m/s, což je poměrně málo, a pokud váš směr GPS není při nízké rychlosti příliš spolehlivý, možná budete muset toto číslo zvýšit. Vyzkoušejte 2.0 a zjistěte, zda to pomůže při tkaní při nízké rychlosti.
V ovladači řízení jsou 3 klíčové parametry, které budou řídit tkaní:
- Menší STEER2SRV_P omezí tkaní, zkuste jej snížit o 0.1 najednou
- Větší STEER2SRV_D „ztlumí“ tkaní, ale pokud jej uděláte příliš velký, dostanete vysokorychlostní oscilaci. Například můžete zjistit, že hodnota 0.1 snižuje tlumení, ale hodnota 0.2 by mohla způsobit vysokorychlostní oscilace v servořízení. Pokud dosáhnete rychlé oscilace, snižte hodnotu STEER2SRV_D o 50 %.
- Větší STEER2SRV_TCONST zpomalí ovladač řízení, což sníží tkaní. Zkuste jej zvýšit v krocích po 0.1.
Se současným řídicím systémem musíte s těmito hodnotami trochu experimentovat, abyste dosáhli požadovaného chování.
Ladění pro automatický vzlet¶
Chcete-li vyladit pozemní řízení pro automatický vzlet, je obecně nejlepší provést ladění v režimu FBWA a přepnout na automatický vzlet až poté, co můžete vzlétnout v režimu FBWA, aniž byste zcela přetlačili řízení (tj. vzlétnout bez použití kormidla ).
Také může být velmi užitečné použít volbu FBWA Takeoff Elevator k nastavení stejného chování automatického výtahu, jaké se používá při automatickém vzletu v režimu FBWA. To pomáhá udržet ocasní kola na zemi v letadle s taildraggerem (a může být také použito k udržení příďových kol na zemi u tříkolových letadel).
Omezení řízení, aby se zabránilo převrácení křídla¶
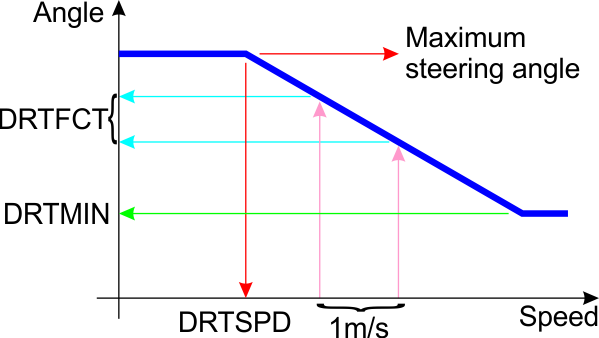
Na velkých rychlých letadlech, zejména s velkým rozpětím křídel, existuje možnost převalování na křídle, pokud je řízení příliš agresivní. K vyřešení tohoto problému lze nastavit omezování řízení, které sníží úhly řízení s rostoucí rychlostí. Když je rychlost nižší než nastavená rychlost snížení, nedojde k žádnému omezení a úhel řízení se projde beze změn. Když se rychlost zvýší, úhel řízení se začne snižovat rychlostí nastavení, dokud není dosaženo minimálního úhlu řízení.
- DRTSPD — Po této rychlosti se úhel řízení zmenší
- DRTFCT — Počet stupňů, které se mají snížit za každé další zvýšení rychlosti m/s
- DTRMIN — minimální úhel řízení, který nebude dále snižován
Úhel řízení vs. rychlost lze znázornit pomocí následující tabulky:
Otázky, problémy a návrhy týkající se této stránky lze vznášet na fórech. Problémy a návrhy mohou být zveřejněny na fórech nebo na Github Issue Tracker.
© Copyright 2024, ArduPilot Dev Team.
Zavedli jsme funkci pro použití kormidla k řízení příďového kola nezávisle na směrovce. Protože Microsoft Flight Simulator zatím tuto funkci nativně nepodporuje, museli jsme být kreativní, abychom pro to vytvořili řešení.
Tato funkce je ve výchozím nastavení deaktivována. Než lze řízení oje použít, je třeba jej namapovat na vstup ovladače a aktivovat v nastavení flyPad.
Tato příručka vám pomůže vše nastavit a také poskytne tipy, jak ji používat pro taxi, protože tento realističtější způsob řízení vyžaduje trochu cviku, abyste jej zvládli.
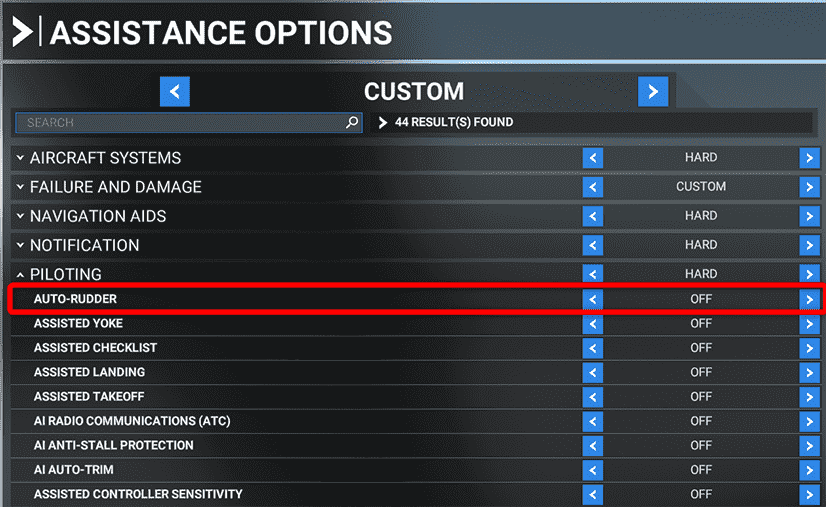
Deaktivujte automatické kormidlo pomoci MSFS
Tento A32NX není kompatibilní s funkcí Microsoft Flight Simulator „Assistance Auto-Rudder“. Tuto funkci je nutné deaktivovat v MSFS.
Doporučujeme vypnout všechny asistenční funkce v MSFS, protože narušují systémy A32NX.
Co je Tiller
Oj je ruční kolo umístěné vedle boční páky na bočních konzolách.

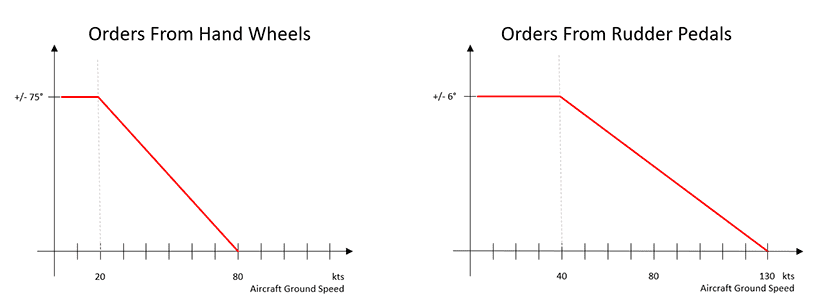
Toto ruční kolo se používá na zemi k otáčení příďového kola při pojíždění. Může otočit příďové kolo až o 75° v obou směrech.
Ovladače kormidla mohou otočit pouze příďové kolo až o 6° a nebudou stačit pro operace taxi.
Maximální úhel natočení příďového kola je závislý na rychlosti a limity, do kterých se může otočit, jsou uvedeny v tomto grafu:
Řízení příďového kola je funkční, když:
- Žlutý tlakový systém je k dispozici a je pod tlakem
- Jeden motor běží
- Hlavní podvozek je na zemi
- A/SKID a N/W STRG jsou zapnuté
- Ovládání odtahu je v normální poloze
Kormidelní oj má tlačítko, které umožňuje odpojení jakýchkoli příkazů kormidla od příďového kola.
Pozemní posádka může deaktivovat systém řízení pomocí spínače v elektrické tažné skříni pro tažení. Na horním ECAM se pak zobrazí MEMO «N/W STEER DISC» (zeleně při vypnutých motorech, oranžově, pokud alespoň jeden motor běží).
Microsoft Flight Simulator má někdy k letadlu připojený neviditelný vlečný remorkér. ECAM MEMO vám to pomůže rozpoznat.
Mapování osy kormidla
Použití osy
Microsoft Flight Simulator představil samostatnou osu příďového kola se spuštěním aktualizace Sim Update 9.
Kvůli kompatibilitě máme aktuálně k dispozici dvě nastavení pro použití s naší implementací Nose Wheel Tiller. Původně jsme k mapování pohybu vámi požadovaného ovladače používali nepoužívanou osu. Podívejte se prosím na dvě možnosti níže:
- OSA ŘÍZENÍ PŘÍDNÍHO KOLA — Doporučené nastavení
- MIXTURE 4 AXIS (-100 % až 100 %) — Zastaralé pro budoucí odstranění.
Jak nakonfigurovat OSU ŘÍZENÍ NOSNÍHO KOLA
Najděte následující nastavení:

Namapujte OSU ŘÍZENÍ NOSE WHEEL STEERING na osu ovladače, kterou chcete použít pro oj. Ta se musí lišit od osy, kterou používáte pro kormidlo.
Jak nakonfigurovat MIXTURE 4 AXIS (-100 % až 100 %) — STARÝ
Upozorňujeme, že tato konfigurace je zastaralá a v budoucnu bude odstraněna.

Namapujte MIXTURE 4 AXIS (-100 % až 100 %) na osu ovladače, kterou chcete použít pro kultivátor. Musí se lišit od osy, kterou používáte pro kormidlo.
Francouzská verze MSFS
MSFS bohužel nezobrazuje osu MIXTURE 4 AXIS (-100 % až 100 %) ve francouzském překladu Microsoft Flight Simulatoru. Osa by se měla jmenovat AX MÉLANGE 4 (-100 À 100 %) . Chcete-li mapovat osu, musíte přepnout MSFS na anglický jazyk. Po mapování (a testování) můžete přepnout MSFS zpět na francouzštinu.
Pokud máte otočnou letovou páku, jako je Thrustmaster TCA Sidestick Airbus Edition, a máte také pedály kormidla, můžete namapovat kormidlo na vaše hardwarové pedály (jak by mělo být) a osu otáčení sidesticku pro kormidlo.
Pokud používáte externě nakonfigurované ovládací prvky pomocí SPAD.neXt, FSUIPC nebo Axis and Ohs, můžete použít událost SIMCONNECT:AXIS_STEERING_SET. Parametr pro zcela vlevo je -16383, pro přímý je 0 a pro zcela vpravo je +16383.
Pomocí klávesnice nebo tlačítek ovladače
Alternativně k mapování osy můžete také mapovat klávesy z klávesnice nebo tlačítka z ovladače.
Použijte tato nebo podobná mapování na ovladači nebo klávesnici:

Zvýšení otočí oj a příďové kolo doprava.
Snížením se oj a příďové kolo otočí doleva.
Pokud používáte externě nakonfigurované ovládací prvky pomocí SPAD.neXt, FSUIPC nebo Axis and Ohs, můžete použít události SIMCONNECT:STEERING_DEC a SIMCONNECT:STEERING_INC.
Tlačítko odpojení pedálu
Ruční kolo kormidla má tlačítko pro odpojení jakéhokoli vstupu od pedálů kormidla k příďovému kolu. Toto tlačítko se běžně používá při provádění kontrol kormidla při pojíždění, takže nedochází k neočekávanému pohybu předního kola.
Opět platí, že Microsoft Flight Simulator toto přímo nepodporuje, takže jsme znovu použili existující možnost namapovat klíč nebo tlačítko na toto.
Možnost MSFS Controller Option, kterou používáme, je TOGGLE WATER RUDDER a vaše mapování by mělo vypadat takto:

Tato klávesa/tlačítko se nepoužívá jako přepínač! Aby odpojení fungovalo, musíte tlačítko/klávesu přidržet!
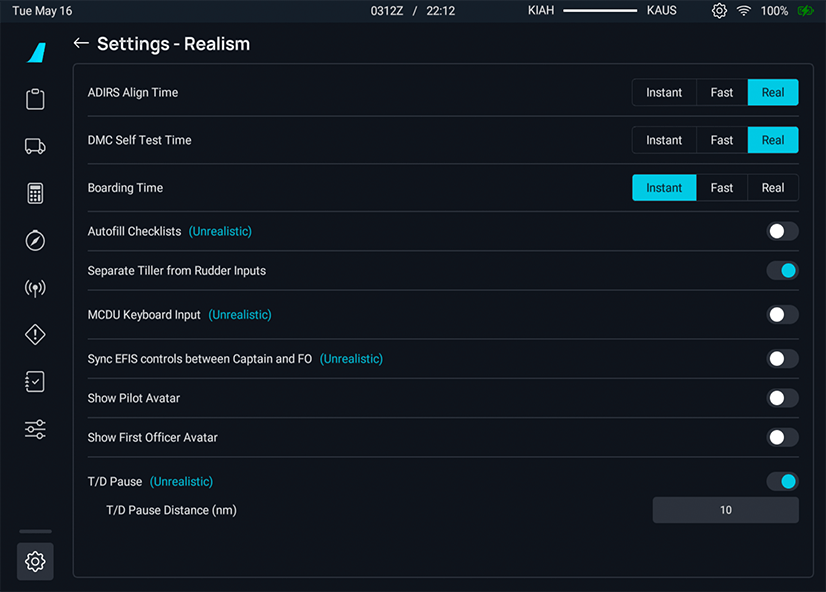
Aktivace funkce v flyPad
Chcete-li aktivovat funkci kormidla, musíte přejít na stránku nastavení flyPadu a přejít na kartu Realismus. Odtud povolte funkci Oddělit kormidlo od kormidla.
Použití kormidla a kormidla
Taxi
Jak je popsáno výše, pojíždění s kormidlem ovládajícím příďové kolo se bude lišit od použití kormidla a řízení příďového kola dříve.
Nejvýraznější změnou je, že řízení s kormidlem na zemi natočí příďové kolo pouze do 6°, což pro běžné taxi operace a většinu zatáček nebude stačit.
Druhou důležitou změnou je, že řízení oje musíte ovládat pomalu a předvídavě, protože příďové kolo se otáčí poměrně pomalu. To znamená, že musíte začít řídit dříve a pomaleji, abyste mohli zatáčet, a také začít dříve, abyste ukončili zatáčení.
Mnohem důležitější je sledovat rychlost letadla vůči zemi, protože úhel příďového kola je omezený jako funkce rychlosti. Před ostrými zatáčkami proto zpomalte.
Doporučujeme to trochu procvičovat, dokud si na to nezvyknete.
Doporučujeme použít osu pro oj, protože klíče nebo tlačítka se mnohem hůře používají pro řízení příďového kola.
Vzlet a přistání
Při vzletu a přistání budete obvykle používat pouze směrové kormidlo a musíte si být vědomi toho, že to dává určitou pravomoc otáčení pouze nad příďovým kolem (do 6°). To je zvláště důležité, pokud jedete pomalu, když má směrovka omezený účinek.
Známé problémy
Vzhledem k tomu, že aktuální řešení je řešením chybějící funkce Microsoft Flight Simulatoru, existují v implementaci některé malé problémy:
- Plná kormidlo na jednu stranu a kormidlo na opačnou stranu může hýbat řízením i bez hydraulického pohonu
- Plná kormidla může do určité míry překonat naši implementaci systému. Je možné pohybovat příďovým kolem i bez hydraulického pohonu, protože MSFS bude otáčet kolem, i když se naše interní implementace vůbec nepohybuje.
Úprava animace řízení tak, aby ukazovala stav našeho vnitřního systému, tyto problémy zamaskuje a umožní dokonalé vizuální chování. Ale může to způsobit podivné chování při rotaci roviny, když jsou tyto problémy spuštěny.
















