Smyslem kalibrace vašeho auta je zajistit, aby jezdilo konzistentně. Pokud máte servo řízení, pak osel potřebuje znát hodnoty PWM spojené s úplnými levými a úplnými zatáčkami doprava. Pokud máte ESC, pak osel potřebuje znát hodnoty PWM pro plný plyn vpřed, zastavení a plný plyn vzad. Tyto hodnoty zjistíte v procesu kalibrace a poté je uložíte do souboru myconfig.py, abyste je mohli použít, když auto jede.
Některé druhy hnacích ústrojí není nutné kalibrovat. Pokud používáte jakékoli hnací ústrojí, které používá ovladač motoru L298N nebo podobný (spíše než ESC), pak není nutná žádná kalibrace; tyto pohony nepoužívají PWM; používají pracovní cyklus, který není třeba kalibrovat. Většina diferenciálních hnacích ústrojí (těch, jejichž název začíná DC_TWO_WHEEL ) je tohoto typu. Pokud vaše hnací ústrojí používá ovladač motoru L298N nebo podobný pro ovládání plynu, ale pro řízení používá servo, pak budete muset kalibrovat řízení, ale ne plyn.
Úplnější diskuse o hnacích ústrojích je v Akčních členech
Jak upravit nastavení auta
Chcete-li provést kalibraci, budete muset do Pi provést ssh.
Všechna výchozí nastavení vozu jsou v souboru config.py . Výchozí nastavení můžete přepsat úpravou skriptu myconfig.py v adresáři vašeho auta. Toto bylo vygenerováno, když jste spustili příkaz donkey createcar —path ~/mycar. Tento soubor můžete ve svém autě upravit spuštěním:
nano ~/mycar/myconfig.py Kalibrace řízení
Ujistěte se, že je vaše auto nad zemí, aby nedošlo k útěku.
- Zapněte auto.
- Najděte 3kolíkový kabel serva a ujistěte se, že je připojen k výstupním kolíkům PWM.
- pokud používáte Donkey Hat, 3kolíkový servo kabel bude zapojen do klobouku. Úplný popis připojení naleznete v části Ovládání ESC a serva řízení pomocí RC Hat.
- pokud používáte PCA9685, servokabel bude připojen k jednomu ze 9685pinových vstupních kanálů PCA3. Popis viz Připojení Servo Shield k Raspberry Pi.
- Spusťte kalibraci osla. a poskytněte mu argumenty pro specifikaci, který pin bude produkovat PWM
- Při kalibraci hnacího ústrojí, které používá specifikátory pinů, jako je PWM_STEERING_THROTTLE , pak použijte argument —pwm-pin k určení cílového pinu, jako je RPI_GPIO.BOARD.33 nebo PCA9685.1:40.13 . Pokud používáte Donkey Hat, pak byste ke kalibraci řízení použili oslí kalibraci —pwm-pin=PIGPIO.BCM.13. Pro úplnější diskusi o pinech a specifikátorech pinů viz Piny.
- Při použití staršího hnacího ústrojí PCA9685, jako je I2C_SERVO , zadejte kanál PCA9685 (index 3pinového konektoru, ke kterému je kabel připojen) a sběrnici I2C, ke které je PCA9685 připojen; osel kalibrovat —kanál —sběrnice=
- Jméno najděte hodnotu, která otočí pneumatiky úplně doleva extrémní. Při kalibraci řízení chcete zvolte hodnotu, která právě otočí kola na maximum; kola by se měla otočit až na doraz, ale servo by mělo NENÍ vydávat kňučivý zvuk. Zkuste hodnotu 360 a měli byste vidět, jak se kola na vašem voze mírně pohnou. Pokud ne, zkuste 400 nebo 300. Dále zadejte hodnoty +/- 10 od vaší počáteční hodnoty, abyste našli nastavení PWM, které způsobí, že se vaše auto otočí úplně doleva, a znovu se ujistěte, že motor nevydává kvílivý zvuk. Tuto hodnotu si zapamatujte.
- další najděte hodnotu, která otočí pneumatiky úplně doprava extrémní. Zadejte hodnoty +/- 10 od vaší počáteční hodnoty, abyste našli nastavení PWM, které způsobí, že vaše auto zatočí úplně doprava, a opět se ujistěte, že motor nevydává kvílivý zvuk. Tuto hodnotu si zapamatujte.
Upravte skript myconfig.py ve svém autě a zadejte tyto hodnoty jako STEERING_LEFT_PWM a STEERING_RIGHT_PWM.
- STEERING_LEFT_PWM = PWM pro úplné levé odbočení
- STEERING_RIGHT_PWM = hodnota PWM pro úplné zatáčení doprava
Kalibrace škrticí klapky
- Najděte 3kolíkový kabel ESC a ujistěte se, že je připojen k výstupním kolíkům PWM.
- pokud používáte Donkey Hat, 3kolíkový kabel ESC bude zapojen do klobouku. Kompletní popis připojení naleznete v části Ovládání ESC a serva řízení pomocí RC Hat.
- pokud používáte PCA9685, 3pinový kabel ESC bude připojen k jednomu ze 9685pinových vstupních kanálů PCA3. Popis viz Připojení Servo Shield k Raspberry Pi.
- Spusťte kalibraci osla. a poskytněte mu argumenty pro specifikaci, který pin bude produkovat PWM
- Při kalibraci hnacího ústrojí, které používá specifikátory pinů, jako je PWM_STEERING_THROTTLE , pak použijte argument —pwm-pin k určení cílového pinu, jako je RPI_GPIO.BOARD.33 nebo PCA9685.1:40.13 . Pokud používáte Donkey Hat, pak byste ke kalibraci plynu použili kalibraci osla —pwm-pin=PIGPIO.BCM.18. Pro úplnější diskusi o pinech a specifikátorech pinů viz Piny.
- Při použití staršího hnacího ústrojí PCA9685, jako je I2C_SERVO , zadejte kanál PCA9685 (index 3pinového konektoru, ke kterému je kabel připojen) a sběrnici I2C, ke které je PCA9685 připojen; osel kalibrovat —kanál —sběrnice=
- Na výzvu k zadání hodnoty PWM zadejte 370.
- Měli byste slyšet pípnutí ESC oznamující, že je kalibrován.
- Zadejte 400 a měli byste vidět, jak se kola vašich aut začínají pohybovat vpřed. Pokud ne, je pravděpodobné, že je to obráceně, zkuste místo toho zadat 330.
- Zkoušejte různé hodnoty, dokud nenajdete rozumnou maximální rychlost a zapamatujete si tuto hodnotu PWM.
Zpětný chod na RC autech je trochu složitější, protože ESC musí dostat zpětný impuls, nulový impuls, zpětný impuls, aby mohl začít jet zpět. Pro kalibraci obráceného nastavení PWM.
- Použijte stejnou techniku jako výše nastavte nastavení PWM na nulový plyn.
- Zadejte hodnotu zpětného chodu, poté hodnotu nulového plynu a poté znovu hodnotu zpětného chodu.
- Zadejte hodnoty +/- 10 zpětné hodnoty, abyste našli přiměřenou rychlost zpětného chodu. Pamatujte si tuto obrácenou hodnotu PWM.
Nyní otevřete svůj skript myconfig.py a zadejte hodnoty PWM pro vaše auto do části throttle_controller:
- THROTTLE_FORWARD_PWM = hodnota PWM pro plný plyn vpřed
- THROTTLE_STOPPED_PWM = hodnota PWM pro nulový plyn
- THROTTLE_REVERSE_PWM = hodnota PWM při plném zpětném chodu plynu
Jemné doladění kalibrace
Nyní, když máte své auto zhruba zkalibrované, můžete s ním zkusit řídit, abyste si ověřili, že jede podle očekávání. Zde je návod, jak doladit kalibraci vašeho vozu.
Za prvé a to nejdůležitější, ujistěte se, že vaše auto jede dokonale rovně když není aplikován žádný vstup do řízení.
- Nastartujte své auto spuštěním python manage.py drive .
- Přejděte v prohlížeči na adresu:8887.
- Několikrát stiskněte klávesu i na klávesnici, aby se vůz rozjel vpřed. To je nejlepší udělat, pokud máte auto na velmi rovné podlaze s nějakou mřížkou, abyste mohli odhadnout, zda jede rovně. Pozor, nepleťte si rozjíždění šikmo s jízdou po oblouku. Jízda pod úhlem může jednoduše znamenat, že jste auto při startování namířili pod úhlem. Jízda zakřiveným obloukem znamená, že auto řídí.
- Pokud má vaše auto tendenci odbočovat doleva bez použití řízení, aktualizujte ve svém STEERING_LEFT_PWM myconfig.py soubor, takže je blíže neutrální. Pokud je například STEERING_LEFT_PWM 460 a STEERING_RIGHT_PWM je 290, pak trochu snižte STEERING_LEFT_PWM, možná 458.
- Pokud má vaše auto tendenci točit doprava, aniž by bylo použito řízení, aktualizujte STEERING_RIGHT_PWM ve svém myconfig.py soubor, takže je blíže neutrální. Pokud je například STEERING_LEFT_PWM 460 a STEERING_RIGHT_PWM je 290, pak trochu zvyšte STEERING_RIGHT_PWM, možná 292.
- Opakujte tento postup několikrát, dokud nebudete mít vůz rovně.
Dále se snažte udělat to tak, aby úplná zatáčka doleva a zatáčka doprava měla stejný úhel zatáčky (při jízdě kolem dokola dělají kruh se stejným průměrem).
- Nastartujte své auto spuštěním python manage.py drive .
- Přejděte v prohlížeči na adresu:8887.
- Stiskněte j, dokud nebude řízení vozu úplně vpravo.
- Stiskněte několikrát i, aby se vůz rozjel dopředu.
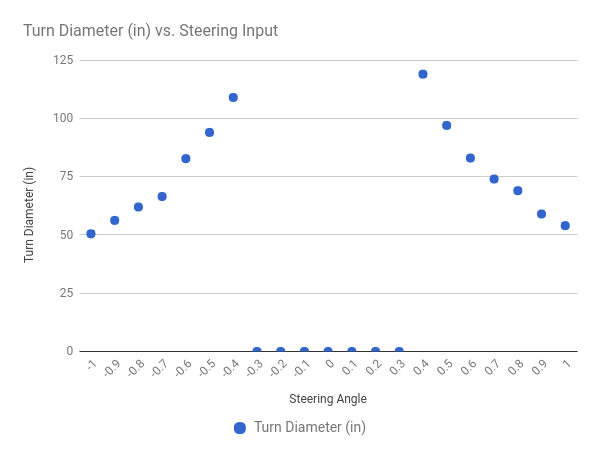
- Změřte průměr závitu a zaznamenejte jej do tabulky.
- Opakujte toto měření pro různé hodnoty řízení pro otáčení v každém směru.
- Zmapujte si je, abyste viděli, zda vaše auto zatáčí stejně v každém směru.
- Pokud vaše auto zatočí stejně při 80% a 100% zatáčce, změňte nastavení PWM pro tento směr zatáčky tak, aby byla hodnota PWM na 80%.
- Pokud je váš vůz nastaven tak, aby zatáčel jedním směrem, změňte hodnoty PWM vašich zatáček v opačném směru, než je směr vychýlení.
Po vyladění auta by měl graf řízení vypadat nějak takto.
Možná budete muset opakovat a ujistit se, že auto jede rovně a že zatáčky doleva a doprava jsou stejné, aby obě fungovaly. Dávejte přednost tomu, aby auto jelo rovně.
V tomto článku se blíže podíváme na snímače úhlu řízení, na to, co dělají, proč je musíte resetovat a dokonce na co si dát pozor u vadného snímače.
Snímače úhlu řízení (SAS) nejsou žádnou novinkou. Ve skutečnosti existují od počátku 1990. S pokroky v systémech elektronické kontroly stability (ESC) se však nutnost jejich resetování po běžné údržbě stala nutností teprve nedávno. I když to přidá další krok k většině řídicích zakázek, představuje to také potenciálně ziskové servisní příležitosti pro znalé autoservisy. Zde se blíže podíváme na SAS, na to, co dělá, proč jej musíte resetovat a dokonce i na co si dát pozor u vadného senzoru. Takže můžete být připraveni na další práci s řízením, resetovat a jít….
Co je snímač úhlu natočení volantu?
Zhruba v posledním desetiletí přidali výrobci do systému řízení vozidla řadu senzorů. Jedním z nich je SAS, který se obvykle nachází v násobcích uvnitř sloupku řízení. Nedílnou součástí systému řízení stability vozidla poskytuje přesné odečítání polohy kol a rychlosti otáčení. Spolupracuje také se snímači stáčení, akcelerometru a rychlosti kol pro měření dynamiky vozidla; co vozidlo dělá, co řidič chce, aby vozidlo dělalo, a jaké korekce musí provést hydraulická řídicí jednotka ABS, aby si zachovala kontrolu nad vozidlem.
Jak fungují snímače úhlu natočení volantu?
Existují dva hlavní typy SAS; analogové a digitální, které se montují do většiny moderních vozidel. Analogové snímače jsou propojeny s referenčním napětím 5 V, uzemněním podvozku a výstupem signálu. Když se kolo otáčí o celý kruh, vytváří signál mezi 0 a 5 volty. Rozdíl napětí se používá k určení rychlosti otáčení a úhlu. Digitální senzory však pomocí LED světla měří rychlost otáčení, úhel natočení kola, směr otáčení a další důležité informace.
Ať tak či onak, pokud SAS detekuje nesoulad mezi polohou volantu a směrem, kterým se vozidlo pohybuje, systém kontroly stability se spustí, aby pomohl řidiči udržet kontrolu nad vozidlem. Pokud například dojde k nedotáčivosti, automaticky použije zadní brzdu na vnitřní straně vozidla, aby se problém odstranil.
Selhávají senzory řízení?
I když jsou SAS navrženy tak, aby vydržely po celou dobu životnosti vozidla, stejně jako ostatní elektronické součástky, podléhají opotřebení. Mohou se také poškodit při práci na jiných částech vozidla, jako je posilovač řízení. Vyplatí se tedy pro každý případ znát běžné příznaky vadného senzoru. Mezi běžné příznaky, na které je třeba dávat pozor, patří:
- Výstražná kontrolka se rozsvítí: když SAS selže, spustí se na palubní desce výstražná kontrolka související se systémem stability, což znamená, že systém byl deaktivován a vyžaduje servis. U většiny vozů to bude kontrolka kontroly trakce, ale může to být také kontrolka kontroly motoru.
- Pohyb ve volantu: pokud je SAS vadný nebo špatně seřízený, může odesílat nepřesné informace do elektronické řídicí jednotky (ECU). To může způsobit, že systém řízení stability vozidla provede nesprávné nastavení řízení, což má za následek buď uvolněný volant, nebo řízení nereaguje tak, jak by mělo.
Proč je nutné provést reset snímače úhlu natočení volantu?
Protože vozidla vybavená ESC, pokročilými asistenčními systémy řidiče (ADAS), jako je asistent udržování v jízdním pruhu (LKA) a autonomní nouzové brzdění (AEB) a dalšími bezpečnostními prvky, spoléhají na přesnost od SAS, je nyní nutné je po provedení resetovat. seřízení kola nebo výměna součásti, která může změnit sbíhavost a úhel tahu. To zajistí, že tyto systémy budou přesně vědět, jak se vozidlo pohybuje po silnici, aby mohly předvídat a provádět nezbytné bezpečnostní korekce. Pokud je SAS mimo kalibraci a úhel je příliš vzdálený, pak systém stability vozidla nebude fungovat správně a nakonec bude deaktivován.
Jak resetujete snímač úhlu natočení volantu?
I když se postup, jak to provést, může mezi výrobci a modely výrazně lišit, existuje několik hlavních metod kalibrace SAS s ostatními senzory, které tvoří tyto systémy:
- Autokalibrace: Některá novější vozidla se mohou samokalibrovat nebo automaticky kalibrovat otočením volantu ze zámku do zámku do středu a poté otočením klíče. Ostatní budou mít také sadu příkazů, které je třeba provést, aby se kalibrace zahájila.
- Zkušební jízda: Novější vozidla s pokročilejšími snímači rychlosti kola mohou automaticky resetovat svůj vlastní snímač úhlu natočení volantu, jakmile vozidlo pojede po stanovenou dobu v přímém směru. Při dálniční rychlosti je to obvykle jen několik sekund.
- Reset diagnostického diagnostického nástroje: U některých vozidel může být vyžadován reset diagnostického nástroje. Některé systémy ustavování mají dokonce zabudovanou funkci resetování SAS, což eliminuje potřebu samostatného diagnostického postupu po vyrovnání.
Většina výrobců doporučuje, aby se kalibrace snímače úhlu natočení volantu prováděla na zemi oproti zdvihu. V případě pochybností se vždy obraťte na servisní příručku výrobce pro správný postup.
Pamatujte si, že bez ohledu na vozidlo a jakýkoli postup, který specifikují, by nyní mělo být resetování úhlu řízení součástí vašeho standardního seřízení a zákazníkovi by mělo být odpovídajícím způsobem zpoplatněno – poskytuje další službu s přidanou hodnotou pro nezávislé autoservisy.















