Proces kalibrace kompasu konfiguruje všechny připojené interní a externí magnetometry. QGroundControl vás povede k umístění vozidla v několika nastavených orientacích a otočení vozidla kolem zadané osy.
# Přehled
Při prvním použití budete muset svůj kompas zkalibrovat a možná jej budete muset znovu zkalibrovat, pokud budou vozidla někdy vystavena velmi silnému magnetickému poli nebo pokud je používán v oblasti s abnormálními magnetickými charakteristikami.
Známky špatné kalibrace kompasu zahrnují kroužení multikoptéry během vznášení, koulování na toaletě (kroužení se zvětšujícím se poloměrem/spirály ven, obvykle konstantní nadmořská výška, což vede k průletu) nebo vybočení z dráhy při pokusu letět rovně. QGroundControl by měl také upozornit na chybu mag senzory nekonzistentní.
K dispozici jsou dva typy kalibrace kompasu:
- Dokončeno: Tato kalibrace je vyžadována po první instalaci autopilota na drak letadla nebo když se výrazně změnila konfigurace vozidla. Kompenzuje účinky tvrdého a měkkého železa pomocí odhadu offsetu a měřítka pro každou osu.
- Částečná («Rychlá kalibrace»): Tuto kalibraci lze provádět jako rutinu při přípravě vozidla na let, po změně užitečného zatížení nebo jednoduše, když se růžice kompasu zdá nepřesná. Tento typ kalibrace pouze odhaduje ofsety pro kompenzaci efektu tvrdého železa.
# Provedení kalibrace
# Předpoklady
Před zahájením kalibrace:
- Vyberte umístění mimo velké kovové předměty nebo magnetická pole.
TIP Kov není vždy samozřejmý! Vyhněte se kalibraci na kancelářském stole (často obsahuje kovové tyče) nebo vedle vozidla. Kalibrace může být ovlivněna i tehdy, když stojíte na betonové desce s nerovnoměrným rozložením výztuže.
# Dokončete kalibraci
Kalibrační kroky jsou:

- Home QGroundControl a připojte vozidlo.
- Vybrat ozubené kolo ikonu (Vehicle Setup) v horním panelu nástrojů a poté Senzory v postranním panelu.
- Klepněte na tlačítko Kompas senzorové tlačítko.
Poznámka Měli byste již mít nastavenou orientaci autopilota. Pokud ne, můžete to také nastavit zde.

Jakmile zkalibrujete vozidlo ve všech polohách QGroundControl zobrazí Kalibrace dokončena (všechny orientační obrázky se zobrazí zeleně a ukazatel průběhu se zcela vyplní). Poté můžete přejít k dalšímu senzoru.
# Částečná «Rychlá» kalibrace
Tato kalibrace je podobná známé kalibraci kompasu podle číslice 8 provedené na chytrém telefonu:
- Držte vozidlo před sebou a náhodně provádějte částečné rotace ve všech jeho osách. Obvykle postačují 2-3 oscilace ~30 stupňů v každém směru.
- Počkejte, až se odhad kurzu stabilizuje, a ověřte, že růžice kompasu ukazuje správným směrem (to může trvat několik sekund).
- Pro tento typ kalibrace neexistuje žádný start/stop (algoritmus běží nepřetržitě, když je vozidlo deaktivováno).
- Kalibrace se okamžitě aplikuje na data (není nutný restart), ale uloží se do parametrů kalibrace až po deaktivaci vozidla (kalibrace je ztracena, pokud mezi kalibrací a vypnutím neprovedete žádnou sekvenci aktivace/deaktivace).
- Amplituda a rychlost dílčích otáček provedených v kroku 1 mohou ovlivnit kvalitu kalibrace. Obvykle stačí dodržovat výše uvedené rady.
# Ověření
Po dokončení kalibrace zkontrolujte, zda jsou ukazatel směru a směr šipky na mapě stabilní a odpovídají orientaci vozidla při jeho otáčení, např. do hlavních směrů.
# Dodatečná kalibrace/konfigurace
Výše uvedený proces automaticky detekuje, nastaví výchozí otáčky, zkalibruje a upřednostní všechny připojené magnetometry.
Další konfigurace kompasu by obecně neměla být vyžadována.
Všechny externí kompasy mají ve výchozím nastavení stejnou prioritu, která je vyšší než priorita sdílená všemi interními kompasy.
# Zakázat kompas
Jak je uvedeno výše, obecně by neměla být vyžadována žádná další konfigurace.
Vývojáři však mohou v případě potřeby zakázat interní kompasy pomocí parametrů kompasu. Tyto mají předponu CALMAGx (kde x=0-3).
Chcete-li zakázat interní kompas:
- Pomocí CAL_MAGn_ROT určete, které kompasy jsou interní. Kompas je interní, pokud CAL_MAGn_ROT==1 .
- Poté pomocí CAL_MAGx_PRIO deaktivujte kompas. To lze také použít ke změně relativní priority kompasu.
# Ladění
Nezpracovaná srovnávací data pro magnetometry (ve skutečnosti pro všechny senzory) lze protokolovat nastavením SDLOG_MODE=1 a SDLOG_PROFILE=64. Další informace naleznete v části Protokolování.
# Další informace
- Periferní zařízení > GPS a kompas
- Základní sestava (průvodce nastavením pro každý letový ovladač)
- Kompenzace výkonu kompasu (pokročilá konfigurace)
- Uživatelská příručka QGroundControl > Senzory
Provoz letadel s pevnými křídly a některých Roverů je možný bez použití kompasu (viz :ref:`), ale použití kompasu se doporučuje pro všechna ostatní vozidla, pokud není vybočení zajištěno nějakým jiným způsobem ( GPS pro vybočení (aka Moving Baseline ) nebo navigace bez GPS nebo externí systémy AHRS)
Tento článek vysvětluje, jak provést základní kalibraci kompasu. Předpokládá, že máte alespoň jeden kompas, buď interně nebo externě v systému, a ten byl povolen. Další informace a nastavení dalších funkcí souvisejících s kompasem najdete v části Pokročilé nastavení kompasu.
Je důležité, aby po dokončení kalibrace kompasu mělo vozidlo dobrý 3D gps zámek, aby bylo zajištěno nejlepší nastavení. V případě potřeby se před kalibrací kompasu přesuňte ven, abyste získali dobrý 3D gps zámek.
Kalibraci kompasu nelze provést, když je vozidlo odjištěno.
Není nutné překalibrovat kompas, když vozidlo letí na nové místo, protože ArduPilot obsahuje „světový magnetický model“, který umožňuje převést magnetický sever místa na skutečný sever bez překalibrování. Kromě toho je „sklon“ místa kalibrován při startu a poté znovu krátce po vzletu.
První kroky kalibrace¶
Kompasy nekalibrujte v blízkosti žádného kovového nebo magnetického předmětu produkujícího pole (počítače, mobilní telefony, kovové stoly, napájecí zdroje atd.), mohlo by dojít k nesprávné kalibraci.
Možná budete chtít deaktivovat jakékoli interní kompasy, pokud se často zobrazuje zpráva „inkonzistentní kompasy“ před paží a jste si jisti, že je externí kompas zkalibrován.
Palubní kalibrace¶
„Onboard Calibration“ je kalibrační rutina, která běží na autopilotu. Tato metoda je přesnější než starší „Offboard Calibration“ (aka „Live Calibration“), která běží na pozemní stanici, protože kromě offsetů se automaticky určuje také měřítko a orientace.
Pokud je parametr orientace desky autopilota nesprávný, může kalibrace selhat pro kompasy integrované do autopilota, pokud existuje.
Chcete-li provést kalibraci všech kompasů na palubě:
- klikněte na tlačítko „Start“ v části „Onboard Mag Calibration“.
- pokud má váš autopilot připojený bzučák, měli byste slyšet jeden tón následovaný krátkým pípnutím jednou za sekundu
- držte vozidlo ve vzduchu a otočte jej tak, aby každá strana (přední, zadní, levá, pravá, horní a dolní) směřovala na několik sekund postupně dolů k zemi. Zvažte otočku o 360 stupňů, přičemž každá zatáčka ukazuje jiný směr vozidla k zemi. Výsledkem bude 6 úplných otočení plus možná nějaký další čas a otáčky pro potvrzení kalibrace nebo opakování, pokud zpočátku neprojde.

Pokud se kalibrace nezdaří:
- uslyšíte „nešťastný“ tón selhání, zelené pruhy se mohou resetovat doleva a kalibrační rutina se může restartovat (v závislosti na pozemní stanici). Plánovač misí se automaticky pokusí znovu, takže pokračujte v otáčení vozidla podle výše uvedených pokynů.
- pokud se kompas nekalibruje, zvažte přesun do jiné oblasti daleko od magnetického rušení a vyjměte elektroniku z kapes.
- pokud ani po několika pokusech kompas neprošel kalibrací, stiskněte tlačítko „Cancel“ a změňte rozevírací seznam „Fitness“ na uvolněnější nastavení a zkuste to znovu.
- pokud kalibrace kompasu stále selže, může pomoci zvýšit COMPASS_OFFS_MAX z 850 na 2000 nebo dokonce na 3000
- konečně, pokud se jeden kompas nekalibruje a důvěřujete ostatním, deaktivujte jej.
Palubní kalibrace pomocí RC spínače¶
Palubní kalibraci lze spustit pomocí RC přepínače namísto výše uvedené techniky Mission Planner. To umožňuje kalibraci bez zamotání USB kabelu.
Nastavte kanál RC pro zahájení kalibrace nastavením jeho RCx_OPTION na „171“. Vysoká hodnota na kanálu zahájí kalibraci všech kompasů a vy byste pohybovali vozidlem, jak je uvedeno výše. Nízká hodnota zruší kalibraci. Zazní výše uvedené tóny pro úspěch nebo neúspěch.
Velké vozidlo MagCal¶
Velká nebo těžká vozidla jsou nepraktická pro otáčení ve všech osách. Tato funkce umožňuje poměrně přesnou kalibraci, pokud je na autopilotu aktivní GPS zámek a je známý skutečný kurz vozidla, buď pomocí referenčního bodu na mapě Mission Planner, nebo pomocí jiného kompasu (např. mobilního telefonu) a zadáním kurzu vozidla.
Aby tato metoda poskytovala dobrý výsledek, musí být také nastavena správná orientace kompasu. Pokud je orientace nesprávná, tento postup se zdá být úspěšný, zatímco kalibrace kompasu zůstane ve velmi špatném stavu.
zadaný nadpis by měl být PRAVDA, nikoli MAGNETICKÝ. Použití aplikace kompasu v telefonu bude obvykle vyžadovat přidání místní hodnoty deklinace k naměřené hodnotě, aby bylo možné získat SKUTEČNÝ geografický směr, který by měl být zadán.
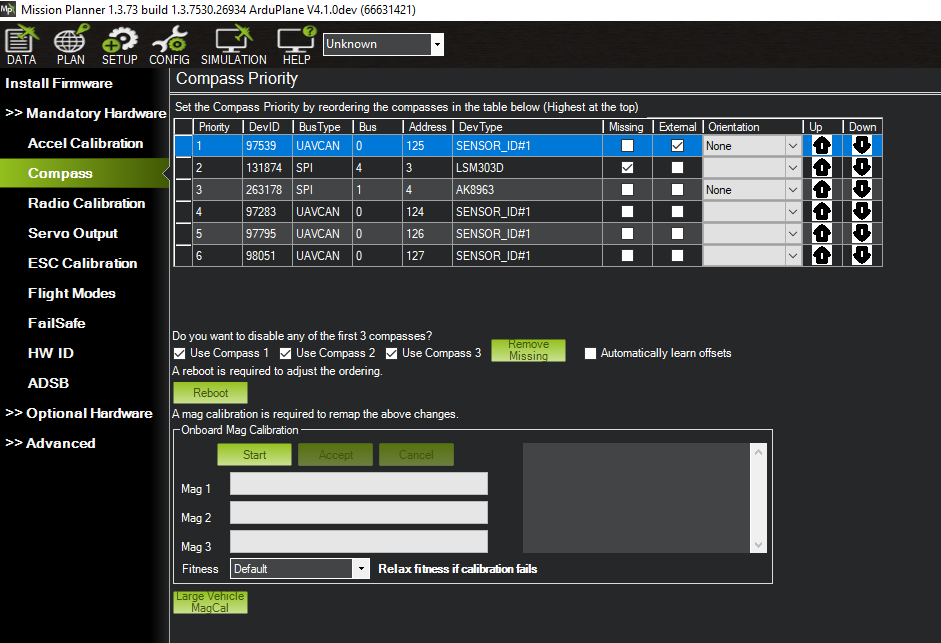
Objednávka kompasu¶
V horní části stránky můžete v případě potřeby změnit prioritu připojených kompasů.
Dodatečné informace¶
Více informací o konfiguraci kompasu naleznete v Rozšířeném nastavení kompasu. To zahrnuje pokyny, jak nastavit další kompasy, automatické nastavení offsetů, nestandardní zarovnání kompasu, kompasmot atd.
Obecnou diskuzi o magnetickém rušení a způsobech jeho snížení lze nalézt v Magnetické rušení.
Video ukázka¶
Video ukázky kalibrace kompasu.
Otázky, problémy a návrhy týkající se této stránky lze vznášet na fórech. Problémy a návrhy mohou být zveřejněny na fórech nebo na Github Issue Tracker.
© Copyright 2024, ArduPilot Dev Team.














