1. Zařízení pro ovládání rychlosti stěrače v systému stěrače čelního skla vozidla, obsahující:
indikátor polohy pro indikaci polohy stěrače vzhledem ke konci zdvihu přes čelní sklo;
generátor signálu, spojený s uvedeným indikátorem polohy, pro generování signálu udávajícího polohu stěrače; a
signálový procesor pro zpracování indikačního signálu polohy, aby se tak vytvořil řídicí signál motoru, který je úměrný požadované rychlosti motoru, přičemž uvedený řídicí signál motoru má konstantní frekvenci a je proměnný jako funkce uvedené polohy stěrače tak, že uvedená rychlost motoru se mění, když se stěrač přibližuje ke konci uvedeného zdvihu.
2. Zařízení podle nároku 1, vyznačující se tím, že uvedený indikátor polohy obsahuje pohyblivý člen, který se pohybuje současně se stěračem, a spínač, spojený s uvedeným pohyblivým členem, který je ovládán jako funkce polohy uvedeného pohyblivého členu, aby tak indikoval poloha stěrače.
3. Zařízení podle nároku 1, vyznačující se tím, že uvedený indikátor polohy obsahuje pohyblivý člen, který se pohybuje společně se stěračem, a optický kodér spojený s uvedeným pohyblivým členem tak, že uvedený optický kodér určuje polohu stěrače pomocí polohy pohyblivého členu. .
4. Zařízení podle nároku 1, vyznačující se tím, že signálový procesor obsahuje filtr pro odfiltrování náhlých změn signálu indikujícího polohu.
5. Zařízení podle nároku 1, vyznačující se tím, že uvedený signálový procesor obsahuje modulátor šířky pulzu pro generování signálu majícího konstantní frekvenci a selektivně proměnný pracovní cyklus, přičemž uvedený pracovní cyklus je proměnný mezi hodnotou rovnou nule voltů a maximálním stavovým napětím, které odpovídá maximální rychlosti stěračů.
6. Zařízení podle nároku 5, vyznačující se tím, že signálový procesor dále obsahuje stejnosměrný stejnosměrný převodník spojený s modulátorem šířky pulzu pro vytváření signálu řízení rychlosti motoru ve formě, která je interpretována motorem, který pohybuje stěračem po čelním skle.
7. Způsob řízení rychlosti stěrače v systému stěrače čelního skla vozidla, který zahrnuje stejnosměrný motor pro pohyb stěrače během zdvihu stěrače podél povrchu čelního skla, zahrnující kroky:
(A) určení polohy stěrače vzhledem ke konci zdvihu stěrače;
(B) definování části zdvihu stěrače v blízkosti konce zdvihu stěrače, přičemž rychlost stěrače je snížena vzhledem ke zbytku zdvihu určením prvního vztahu mezi průměrnou rychlostí stěrače a celkovou dráhou stěrače během zdvihu určení druhého vztahu mezi průměrnou rychlostí stěrače a požadovaným množstvím bočního vytlačení vody z čelního skla a výpočet velikosti zdvihu stěrače, který odpovídá předem zvoleným množstvím vytlačení vody, přičemž se umožní zpomalení stěrače, když se stěrač blíží ke konci stěrače. zdvih, za použití uvedeného prvního a druhého vztahu;
(C) definování stavu zpomalení stěrače, když je místo z kroku (A) v části z kroku (B); a
(D) měnění pracovního cyklu signálu řízení rychlosti motoru, který je přiváděn do stejnosměrného motoru, když je splněna podmínka v kroku (C), aby se tak řídila rychlost stěrače.
8. Způsob podle nároku 7, vyznačující se tím, že krok (D) se provádí dílčími kroky generování signálu pro řízení rychlosti motoru, který je úměrný požadované rychlosti motoru, a modulování signálu řízení rychlosti motoru pomocí modulace šířky pulzu, čímž se generuje řídicí signál mající konstantní frekvenci a selektivně proměnný pracovní cyklus.
9. Způsob podle nároku 8, vyznačující se tím, že pracovní cyklus řídicího signálu se používá k přímému řízení rychlosti stěrače.
10. Způsob podle nároku 7, vyznačující se tím, že krok (A) se provádí dílčími kroky generování polohového signálu, který má napětí udávající polohu stěrače vzhledem ke konci zdvihu stěrače.
11. Způsob podle nároku 10, vyznačující se tím, že krok (D) se provádí dílčími kroky zpracování signálu polohy, aby se tak vytvořil řídicí signál motoru úměrný požadované rychlosti motoru.
12. Způsob podle nároku 11, vyznačující se tím, že krok (D) se provádí pomocí dalších dílčích kroků modulace řídicího signálu motoru pomocí modulace šířky impulzů, aby se tak generoval signál rychlosti motoru, který má konstantní frekvenci a selektivně proměnný pracovní cyklus.
13. Způsob řízení rychlosti stěrače v systému stěrače čelního skla vozidla, který zahrnuje stejnosměrný motor pro pohyb stěrače během zdvihu stěrače podél povrchu čelního skla, zahrnující kroky:
(A) určení polohy stěrače vzhledem ke konci zdvihu stěrače;
(B) definování části zdvihu stěrače v blízkosti konce zdvihu stěrače, přičemž rychlost stěrače je snížena vzhledem ke zbytku zdvihu určením prvního vztahu mezi průměrnou rychlostí stěrače a celkovou dráhou stěrače během zdvihu , určení druhého vztahu mezi průměrnou rychlostí stěrače a hlukem způsobeným tím, že stěrač dosáhne konce zdvihu, a výpočet velikosti zdvihu stěrače, který odpovídá snížení hluku způsobeného stěračem, který dosáhne konce zdvihu, pomocí prvního a druhé vztahy;
(C) definování stavu zpomalení stěrače, když je místo z kroku (A) v části z kroku (B); a
(D) měnění pracovního cyklu signálu řízení rychlosti motoru, který je přiváděn do stejnosměrného motoru, když je splněna podmínka v kroku (C), aby se tak řídila rychlost stěrače.
14. Způsob podle nároku 13, vyznačující se tím, že krok (D) je proveden dílčími kroky generování signálu řízení rychlosti motoru, který je úměrný požadované rychlosti motoru, a modulace signálu řízení rychlosti motoru pomocí modulace šířky pulzu, aby se tak vytvořil řídicí signál mající konstantní frekvenci a selektivně proměnný pracovní cyklus.
15. Způsob podle nároku 14, vyznačující se tím, že pracovní cyklus řídicího signálu se používá k přímému řízení rychlosti stěrače.
16. Způsob podle nároku 13, vyznačující se tím, že krok (A) se provádí dílčími kroky generování polohového signálu, který má napětí udávající polohu stěrače vzhledem ke konci zdvihu stěrače.
17. Způsob podle nároku 16, vyznačující se tím, že krok (D) se provádí dílčími kroky zpracování signálu polohy, aby se tak vytvořil řídicí signál motoru úměrný požadované rychlosti motoru.
18. Způsob podle nároku 17, vyznačující se tím, že krok (D) se provádí pomocí dalších dílčích kroků modulace řídicího signálu motoru pomocí modulace šířky impulzů, aby se tak generoval signál rychlosti motoru s konstantní frekvencí a selektivně proměnným pracovním cyklem.
19. Způsob řízení rychlosti stěrače v systému stěrače čelního skla vozidla, který zahrnuje stejnosměrný motor pro pohyb stěrače během zdvihu stěrače podél povrchu čelního skla, zahrnující kroky:
(A) určení polohy stěrače vzhledem ke konci zdvihu stěrače;
(B) definování části zdvihu stěrače v blízkosti konce zdvihu stěrače, přičemž rychlost stěrače je snížena vzhledem ke zbytku zdvihu určením prvního vztahu mezi průměrnou rychlostí stěrače a celkovou dráhou stěrače během zdvihu určení druhého vztahu mezi průměrnou rychlostí stěrače a nežádoucí velikostí deformace zdvihu stěrače a výpočet velikosti zdvihu stěrače, který je potřebný pro kompenzaci nežádoucí deformace, s použitím prvního a druhého vztahu;
(C) definování stavu zpomalení stěrače, když je místo z kroku (A) v části z kroku (B); a
(D) měnění pracovního cyklu signálu řízení rychlosti motoru, který je dodáván se stejnosměrným motorem, když je splněna podmínka v (C), aby se tím řídila rychlost stěrače.
Dosavadní stav techniky
Konvenční systémy stěračů čelního skla vozidel zahrnují stěrače, které se pohybují obloukovitým pohybem po čelním skle, aby odstranily nežádoucí vodu z čelního skla. Typický vzor stírání stěrače čelního skla je půlkruhový oblouk. Stěrač začíná na jednom konci oblouku, pohybuje se přes čelní sklo na opačný konec oblouku a v tomto bodě obrátí směr a vrací se do výchozí polohy. Takový pohyb nutně zahrnuje zrychlení stěrače čelního skla z jednoho konce oblouku na druhý konec. Konce oblouku se běžně označují jako body obrácení vzoru stěrače.
S konvenčními systémy stěračů čelního skla jsou spojeny různé nedostatky a nevýhody. Například zrychlení lopatky do bodu obratu následované náhlým zastavením v bodě obratu často vytváří nežádoucí hluk. Dále zrychlení stěrače až do bodu obratu může mít za následek růst vzoru stírání nebo deformaci předem zvoleného vzoru stěrače v důsledku opotřebení součástí systému stěrače způsobeného zrychlením a náhlým zastavením stěrače v bodech obratu. . Dále může být při vysokých rychlostech stěračů množství bočního vytlačování vody z vozidla zvýšeno na nežádoucí množství.
Tyto nevýhody jsou spojeny se systémy stěračů čelního skla, které zahrnují tandemový symetrický překrývající se vzor stěrače čelního skla, nebo se systémy, které mají jediné vysouvací rameno s jedinou lištou stěrače.
Tento vynález poskytuje systém stěrače čelního skla, který překonává výše uvedené nedostatky a nevýhody. Tento vynález snižuje účinky, které jsou obvykle považovány za nežádoucí, zpomalením rychlosti motoru pro předem zvolenou část vzoru stírání těsně před body obrácení. Tento vynález s výhodou obsahuje stejnosměrný motor s proměnnou rychlostí, přičemž rychlost motoru se mění jako funkce polohy listu stěrače vzhledem k bodům obratu vzoru stírání.
Obecně řečeno, tento vynález poskytuje zařízení pro řízení rychlosti stěrače v systému stěrače čelního skla vozidla. Zařízení obsahuje indikátor polohy pro indikaci polohy stěrače vzhledem ke konci zdvihu přes čelní sklo. Generátor signálu je připojen k indikátoru polohy pro generování napěťového signálu, který indikuje polohu stěrače. Signálový procesor zpracovává signál indikující polohu, aby tak vytvořil řídicí signál motoru, který je úměrný požadované rychlosti motoru. Ve výhodném provedení má řídicí signál motoru konstantní frekvenci a proměnný pracovní cyklus. Pracovní cyklus se mění jako funkce polohy stěrače na čelním skle vzhledem k bodům obrácení vzoru stěrače.
Tento vynález také poskytuje metodologii pro řízení rychlosti stěrače v systému stěrače čelního skla vozidla, který obsahuje stejnosměrný motor pro pohyb stěrače během zdvihu stěrače podél povrchu čelního skla. Výhodná metodologie spojená s tímto vynálezem zahrnuje čtyři základní kroky. Nejprve se určí umístění stěrače vzhledem k bodu obratu nebo konci zdvihu stěrače. Za druhé je určena část zdvihu stěrače přilehlá ke konci zdvihu, přičemž rychlost stěrače je výhodně snížena vzhledem ke zbytku zdvihu. Stav zpomalení stěrače je definován jako stav, kdy umístění stěrače vzhledem ke konci je v části zdvihu stěrače definovaného ve druhém kroku. A konečně, pracovní cyklus řídicího signálu rychlosti motoru, který je přiváděn do stejnosměrného motoru, se mění, když je splněna podmínka zpomalení stěrače z třetího kroku, aby se řídil pohyb kotvy a rychlost stěrače tak, že stěrač se zpomalí před dosažením bodu obrácení zdvihu stěrače. Další výhody a cíle tohoto vynálezu budou odborníkům v oboru zřejmé z následujícího podrobného popisu výhodných provedení.
STRUČNÝ POPIS VÝKRESŮ
Obr. 1 je blokové schéma znázornění vybraných součástí systému ovládání stěračů čelního skla podle vynálezu.
Obr. 2 je schematické znázornění vzoru stěrače čelního skla.
PODROBNÝ POPIS VÝHODNÝCH PROVEDENÍ
Obr. 1 znázorňuje vybrané součásti řídicího systému 10 stěrače čelního skla. Provozní součásti systému stěrače jsou znázorněny jako část 12 na OBR. Systém stěrače sám o sobě obsahuje stejnosměrný motor 1, který má přednostně proměnnou rychlost motoru reagující na řídicí signál motoru dodávaný do motoru. Lišty 14 stěrače jsou spojeny s motorem 16 a jsou jím poháněny prostřednictvím konvenčního spojovacího článku 14. Spojovací článek 18 výhodně pohybuje lištami 18 stěrače vzorem stěrače podle řídicího signálu motoru přijatého v motoru 16.
Indikátor 20 polohy ramene a lišty zahrnuje zařízení pro snímání polohy používané k určení polohy lišty stěrače na čelním skle vzhledem k bodům obrácení vzoru stírání. Zařízení pro snímání polohy výhodně obsahuje spínač ovládaný například vačkou nebo destičkou, nebo optickým kodérem nebo magnetickým snímacím zařízením, které je propojeno vhodnou elektronikou pro vytváření elektrického signálu indikujícího polohu listu stěrače. Ve výhodném provedení je napětí elektrického signálu ze zařízení pro snímání polohy řídící nebo důležitou charakteristikou signálu. Napěťový signál s indikací polohy je vytvářen obvodem úrovně signálu znázorněným rámečkem 24 blokového schématu.
Napěťový signál udávající polohu je zpracováván obvodem 26 pro zpracování signálu tak, že se signál stává úměrným požadované rychlosti motoru v závislosti na poloze listu stěrače vzhledem k bodu obratu nebo koncovému bodu zdvihu stěrače. Určení požadované rychlosti motoru závisí na tom, zda je poloha stěrače ve zpomalovací části nebo zóně vzoru listu stěrače, kde je žádoucí, aby list stěrače před dosažením bodů obratu zpomalil. Úhly definující optimální povrchovou plochu pokrytou zpomalovací částí vzoru stěrače mohou být určeny pro každé vozidlo. Úhly, při kterých bude snížená rychlost optimalizovat výkon systému s ohledem na hluk, růst úhlu a vypuzování vody, je třeba určit pro konkrétní systém stěračů vozidla analýzou systému a experimentováním, které by odborník v oboru pochopil, a proto nemusí. být dále popsán.
Zpracování signálu, ke kterému dochází na 26, přednostně zahrnuje posouvání a filtrování úrovně, aby se vyhladily charakteristiky napěťového signálu přijímaného z obvodu 24 úrovně signálu. Posun a filtrování úrovně se používají, například pro vyhlazení účinků náhlých změn rychlost motoru, která může nastat, když se lišta 16 stěrače pohybuje vzorem stěrače.
Řídicí signál produkovaný obvodem 26 pro zpracování signálu, který je výhodně přímo úměrný požadované rychlosti motoru, je zpracován modulátorem 28 šířky impulsů, aby se tak vytvořil signál s konstantní frekvencí a proměnným pracovním cyklem. Pracovní cyklus modulovaného signálu vytvářeného modulátorem 28 je výhodně proměnný mezi 0 volty a vysokým stavovým napětím, které odpovídá provozu maximální rychlosti stěrače. Vysoké stavové napětí je s výhodou vhodné pro buzení výkonového polovodičového zařízení, jako je hradlo MOSFET.
Signál modulovaný šířkou pulzu je poté zpracován obvodem 30 stejnosměrného stejnosměrného konvertoru. Obvyklý stejnosměrný stejnosměrný obvod konvertoru, jako je dvoutranzistorový poloviční můstek nebo čtyřtranzistorový obvod H-můstek, pracuje vhodně ve výhodném provedení tohoto vynálezu. Obvod 30 stejnosměrného stejnosměrného měniče vydává řídicí signál motoru, který je přednostně aplikován na kotvu stejnosměrného motoru se dvěma kartáči. Napětí kotvy motoru 14 výhodně sleduje signál řízení rychlosti motoru, a proto má rychlost motoru tendenci sledovat napětí kotvy.
Obr. 2 znázorňuje ve schematické formě list 16 stěrače ve vzoru stěrače nebo zdvihu 34. Vzor 34 stěrače obsahuje první konec 36 a druhý konec 38. Konce 36 a 38 jsou body obrácení vzoru stěrače. Oblasti označené 40 a 42 jsou zpomalovací části vzoru stěrače, kde je rychlost listu 16 stěrače snížena před dosažením bodu obratu (36 nebo 38) vzoru 34 stěrače. Například znázorněná poloha listu stěrače 16 odpovídá podmínce maximálního zrychlení, když se lišta 16 stěrače pohybuje vzorem 34 stěrače ve směru šipky 44. Jakmile lišta 16 dosáhne bodu označeného přerušovanou čárou 46, pracovní cyklus signálu řízení rychlosti motoru se změní tak, že rychlost motoru se snižuje, když se lopatka 16 pohybuje přes zpomalovací oblast 40. Výzkumy a experimenty ukazují, že nejvýhodnější je zpomalovací zóna odpovídající úhlu oblouku mezi 15 a 30 stupni.
Následuje příklad typického cyklu stírání. Jak je znázorněno na OBR. Jak je znázorněno na obr. 2, lopatka 16, pohybující se ve směru šipky 44, má ve znázorněné poloze maximální rychlost. Prvek 20 pro snímání polohy a obvod 24 úrovně signálu sdělují polohu lišty 16 stěrače zbytku systému 10. Motor 14 přednostně zpomaluje lištu 16 stěrače přibližně o 15 stupňů před polohou úplného stírání, bod obratu 36. Motor dosáhne minima rychlost bezprostředně sousedící s bodem 36 reverzace. Po dosažení bodu 36 zvratu začne list 16 stěrače procházet vzorem stírání podle směrové šipky 48. Snímací prvek 20 polohy a obvod 24 úrovně signálu v kombinaci s dalšími prvky obvodu znázorněnými na OBR. 1, povel motoru 14 ke zrychlení lišty 16 stěrače, jakmile se lišta 16 stěrače posune přibližně o pět stupňů od bodu 36 obratu (tj. po reverzaci v bodě 36 otáčení a zahájení stíracího pohybu ve směru šipky 44). Poloha lopatky 16 znázorněná na OBR. 2 odpovídá čepeli přibližující se k maximální rychlosti při pohybu ve směru šipky 48. Proces zpomalení, podobný tomu popsanému výše, nastane, jakmile čepel 16 vstoupí do zpomalovací zóny 42 a přiblíží se k bodu 38 obratu.
Jak je patrné z výše uvedeného popisu, tento vynález poskytuje užitečný systém a metodologii pro řízení rychlosti stěrače čelního skla jako funkce polohy stěrače vzhledem k bodům obrácení vzoru stírání. Jsou možné další úpravy, jako je změna velikosti zpomalovacích zón v závislosti na rychlosti stěračů. Další možná provedení zahrnují selektivní změnu rychlosti stěrače během jeho zdvihu. Výše uvedený popis je ve své podstatě spíše příkladný než omezující. Rozsah a rozsah tohoto vynálezu bude omezen pouze připojenými nároky.
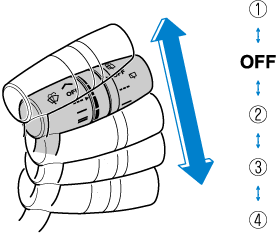
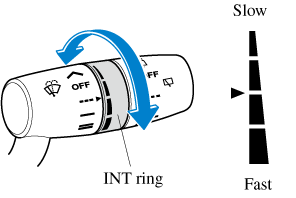
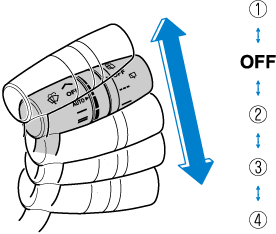
Nastavte páku do přerušované polohy a otáčením kroužku zvolte intervalové časování.
S automatickým ovládáním stěračů
Ovládání při vytažení páky nahoru

Když je páčka stěračů v poloze, dešťový senzor snímá množství srážek na čelním skle a automaticky zapíná nebo vypíná stěrače (vypnuto – přerušovaně – nízká rychlost – vysoká rychlost).
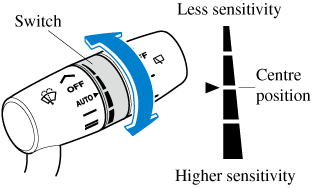
Citlivost dešťového senzoru lze upravit otočením spínače na páčce stěračů.
Ze střední polohy (normální) otočte přepínačem nahoru pro vyšší citlivost (rychlejší odezva) nebo jej otočte dolů pro nižší citlivost (pomalejší odezva).
- Nezastiňujte dešťový senzor nalepením nálepky nebo štítku na čelní sklo. Jinak dešťový senzor nebude fungovat správně.
![]()

- Když je páčka stěračů v
![]() poloze a zapalování je zapnuté, stěrače se mohou automaticky pohybovat v následujících případech:
poloze a zapalování je zapnuté, stěrače se mohou automaticky pohybovat v následujících případech: - Pokud se čelního skla nad dešťovým senzorem dotknete nebo jej otřete hadříkem.
- Pokud je čelní sklo zasaženo rukou nebo jiným předmětem zvenčí nebo zevnitř vozidla.
![]()
Když je páčka stěračů v poloze a zapalování zapnuté, držte ruce a škrabky mimo čelní sklo, protože při automatické aktivaci stěračů by mohlo dojít k přiskřípnutí prstů nebo poškození stěračů a lišt stěračů.
Pokud se chystáte čistit čelní sklo, ujistěte se, že jsou stěrače úplně vypnuté (když je nejpravděpodobnější, že motor běží), což je zvláště důležité při odklízení ledu a sněhu.
![]()
![]()
- Přepnutí páčky automatického stěrače z
![]() k
k ![]() poloha za jízdy aktivuje stěrače čelního skla jednou, poté se spustí podle množství srážek.
poloha za jízdy aktivuje stěrače čelního skla jednou, poté se spustí podle množství srážek. - Ovládání automatického stěrače nemusí fungovat, když je teplota dešťového senzoru přibližně –10 °C (14 °F) nebo nižší nebo přibližně 85 °C (185 °F) nebo vyšší.
- Pokud je čelní sklo potaženo vodoodpudivou vrstvou, dešťový senzor nemusí být schopen správně snímat množství srážek a automatické ovládání stěračů nemusí fungovat správně.
- Pokud na čelním skle nad dešťovým senzorem ulpívají nečistoty nebo cizí předměty (jako je led nebo látka obsahující slanou vodu) nebo pokud je čelní sklo zamrzlé, může to způsobit automatický pohyb stěračů. Pokud však stěrače nedokážou odstranit tento led, nečistoty nebo cizí předměty, automatické ovládání stěračů zastaví činnost. V takovém případě nastavte páčku stěračů do polohy pro nízkou rychlost nebo polohu pro vysokou rychlost pro ruční ovládání nebo ručně odstraňte led, nečistoty nebo cizí předměty, abyste obnovili činnost automatického stěrače.
- Pokud páčka automatického stěrače zůstane v
![]() stěrače mohou fungovat automaticky vlivem silných světelných zdrojů, elektromagnetických vln nebo infračerveného světla, protože dešťový senzor používá optický senzor. Doporučuje se přepnout páčku automatického stěrače do polohy
stěrače mohou fungovat automaticky vlivem silných světelných zdrojů, elektromagnetických vln nebo infračerveného světla, protože dešťový senzor používá optický senzor. Doporučuje se přepnout páčku automatického stěrače do polohy ![]() v jiné poloze než při jízdě s vozidlem za deště.
v jiné poloze než při jízdě s vozidlem za deště. - Funkce automatického ovládání stěračů lze vypnout. Viz Vybavení vozidla (vyhledávání).


 k
k 














